


Master Thesis: Parameter Estimation and Simulation of Driving Datasets
Datasets play a key role in the development of ADS systems (Autonomous Driving Systems). The more diverse and large the datasets are, the better can one train and validate ADS systems. The datasets are collected mostly via real-world drives, e.g. the KITTI dataset [1], where a car equipped with a multitude of sensors drives hundreds of kilometers in diverse environments. Alternatively, simulations can aid in creating physically realistic driving datasets and offset the immense resources required for real-world tests [2]. However, the demand for data by deep learning algorithms often still falls short. The data may lack the desired quantity, the randomness which is difficult to achieve via planned drives or even simulations, and sometimes it is simply too risky to collect data for some dangerous manoeuvers. In fact, experts now estimate tens of billions of kilometers for safe validation of ADS systems [3].
One approach to do this is via scenario variation. One takes a real or synthetic data set, recreates the environment, and generates further variants of the scenarios to achieve the required quantity and quality. Following this approach, Waymo e.g. has accumulated billions of miles through simulations [4]. There are other advantages to “model” datasets, one can create simulation variants that are similarly distributed as real data and therewith conduct realistic studies. E.g. a car simulation may react realistically to driver inputs, but the driver inputs themselves may be sampled from a real dataset, thus making the simulation results relevant to real-life situations.
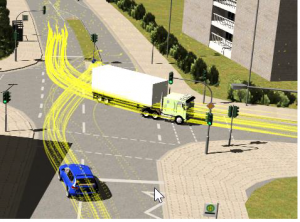
Car executing an evasive maneuver, simulated in VEROSIM
In this work, various publicly available datasets shall be researched, e.g. KITTI, Waymo Dataset, and a methodology shall be developed to efficiently parameterize and model the distributions of the data. This shall be done in the context of the multi-domain simulation framework VEROSIM, which already provides realistic sensor and vehicle simulations. From thereon, there are multiple possibilities to work with the model, at least one of which should be firmly established in this thesis:
- Interface the model with the simulation framework so that the simulation may sample parameter values from the dataset, to “mimic” a drive
- Set up the simulation framework to run variants of a given scenario, their distribution based on a parameter distribution from the dataset
- Identify accident or critical outcomes in the dataset, such that the simulation may exclusively sample “critical” parameter values (that lead to identified critical outcomes)
The thesis can be carried out in English or German.
[1] Geiger, Andreas, et al. „Vision meets robotics: The kitti dataset.“ The International Journal of Robotics Research 32.11 (2013): 1231-1237.
[2] https://www.linkedin.com/pulse/88-billion-miles-testing-needed-make-autonomous-cars-sovani-ph-d-
[3] Cabon, Yohann, Naila Murray, and Martin Humenberger. „Virtual kitti 2.“ arXiv preprint arXiv:2001.10773 (2020).
[4] https://www.theverge.com/transportation/2018/4/19/17204044/tesla-waymo-self-driving-car-data-simulation
Key Words: Driving Datasets, Automotive Simulation, Accident Prediction
Supervisor: Maqbool
Weitere Arbeiten








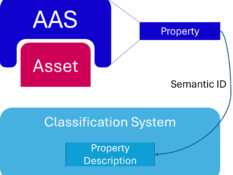
Klassifikationssystem für Merkmale Digitaler Zwillinge auf Basis der Industrie 4.0-Verwaltungsschale



Implementation of an Accelerated Projected Gradient Descent Solver for Multibody Dynamics Simulation




MA: Automatisierung der Verhandlung von digitalen Nutzungsrechten durch Self-sovereign Digital Twins






















































































