


Masterarbeit: Modellierung und Simulation der Dynamik von Astronauten-Jetpacks
Die Weltraumrobotik erlaubt es, einen Großteil der Missionen im All durchzuführen, ohne dass ein Verlassen der Raumstation notwendig ist. Dennoch sind unter gewissen Umständen die Außenboardeinsätze von Astronauten unabdingbar. Hierbei kommen sog. Jetpacks, „Rucksäcke mit kleinen Antriebsdüsen“ zum Einsatz, welche die Fortbewegung von Astronauten im Weltraum mit Hilfe des Rückstoßprinzips ermöglichen.

Das Training der Astronauten erfolgt heute in speziellen Ausbildungszentren, in denen das zu übende Szenario sehr aufwändig in großen Tanks unter Wasser nachgebaut wird. Der Auftrieb des Wassers soll das Verhalten in der Schwerelosigkeit annähern. Mit dem neuen Motionsimulator des MMI besteht jetzt die Möglichkeit, das teure Unterwasser-Setup durch eine Kombination von VR-Technologie und leistungsfähiger Robotik zu ersetzen. In diesem Zusammenhang spielt nicht nur ein realitätsgetreues Dynamikmodell des Jetpacks eine große Rolle, sondern ebenso eine geeignete Mensch-Maschine-Schnittstelle, welche neben einer realitätsnahen Steuerung des Jetpacks auch die Rückkopplung dessen dynamischen Verhaltens erlaubt. Hinsichtlich einer multimodalen Immersion, sollte diese Rückkopplung neben dem visuellen Feedback auch ein taktiles Feedback unter Einsatz des unten gezeigten Motion Simulators des MMI beinhalten.

Aufgabenbeschreibung
Im Rahmen dieser Arbeit soll ein geeignetes Modell zur Abbildung des dynamischen Verhaltens eines Jetpacks entwickelt, implementiert und unter Einsatz des Motion Simulators des MMI evaluiert werden. Die sich daraus ergebenden Teilaufgaben sind wie folgt:
- Literaturrecherche zum Thema: Dynamiksimulation von Jetpacks.
- Entwicklung eines geeigneten Modells zur Abbildung des dynamischen Verhaltens.
- Implementierung des Modells in der Programmiersprache C++ als Plugin der Simulationssoftware VEROSIM.
- Integration des implementierten Modells in ein bestehendes Mehrkörperdynamiksimulationssystem.
- Transfer auf den Motion Simulator des MMI unter Verwendung einheitlicher Schnittstellen zur Anbindung der vorhandenen Hardware.
- Evaluation des implementierten Modells anhand unterschiedlicher Testflüge.
Stichworte: Dynamiksimulation, Weltraum, Motion Simulator
Betreuer: Thieling
Weitere Arbeiten








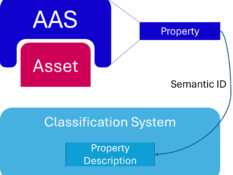
Klassifikationssystem für Merkmale Digitaler Zwillinge auf Basis der Industrie 4.0-Verwaltungsschale



Implementation of an Accelerated Projected Gradient Descent Solver for Multibody Dynamics Simulation




MA: Automatisierung der Verhandlung von digitalen Nutzungsrechten durch Self-sovereign Digital Twins






















































































