


Masterarbeit: Echtzeitfähige dynamische Umgebungsgenerierung mit Hilfe von „Google Cartographer“
Portable Laser Scanner, oder auch LiDAR (Light Detection and Ranging) Sensoren, sind Dank Ihrer hohen Auflösung und Geschwindigkeit optimal für den mobilen Einsatz geeignet. Mit simulateneous localization and mapping (SLAM) steht außerdem eine effiziente Methode zur Verfügung mit diesen Sensoren schnell Grundrisse bzw. Pläne von z.B. Gebäuden zu erstellen. Nutzen finden LiDAR und SLAM in z.B. Staubsaugrobotern, bei mobilen Transportsystemen, oder auch teleoperativ gesteuerten Expeditionsrobotern an Land, in der Luft, oder auch Unterwasser.

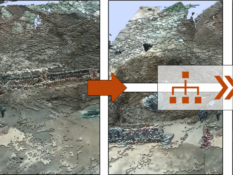
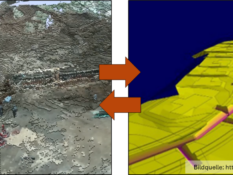
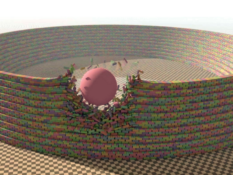
Im Rahmen dieser Arbeit sollen im Kontext der Erkundungs-, Inspektions-, oder „Search and Rescue“- Robotik ROS– basierte mobile Roboter genutzt werden, um mit Hilfe von SLAM Karten für die 3D Simulation in Echtzeit zu erstellen. Das Robot Operating System (ROS) soll hier primär als Kommunikationsplattform zwischen Roboter und Simulationssystem dienen. Als Ausgangspunkt dieser Arbeit soll die von Google entwickelte, und Open Source gestellte, SLAM Bibliothek Cartographer [1] (siehe auch Abb.) dienen. Diese soll an ein 3D Simulationssystem angebunden werden, um sowohl 2D Karten als auch 3D Umgebungen dynamisch zu generieren. Des Weiteren soll die erstellte Karte auch mit dynamischen Änderungen der Umgebung (z.B.: ein einstürzendes Haus) umgehen können und die 3D Simulation in Echtzeit aktualisieren.
Diese Arbeit umfasst sowohl eine ausführliche Literaturrecherche im Bereich von SLAM, die Softwareanbindung von Cartographer (möglich mit Hilfe von ROS [2]), Konzept und Implementierung der dynamisch aktualisierten Umgebung in der 3D Simulation, als auch die experimentelle Untersuchung der Software anhand von Hardwareexperimenten mit mobilen Robotern.
Voraussetzungen hierfür sind neben Kenntnissen in C++ (und Qt), sicherer Umgang mit Linux Systemen und am besten auch erste Erfahrungen im Bereich von ROS.
Stichworte: 3D Simulation, ROS, SLAM, Mapping, Localization
Betreuer: Cichon
[1] Hess, Wolfgang, et al., Real-Time Loop Closure in 2D LIDAR SLAM, ICRA 2016
[2] https://github.com/googlecartographer/cartographer_ros
Weitere Arbeiten








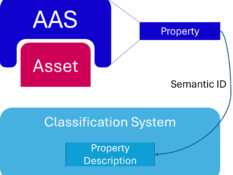
Klassifikationssystem für Merkmale Digitaler Zwillinge auf Basis der Industrie 4.0-Verwaltungsschale



Implementation of an Accelerated Projected Gradient Descent Solver for Multibody Dynamics Simulation




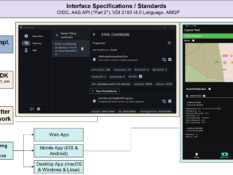
MA: Automatisierung der Verhandlung von digitalen Nutzungsrechten durch Self-sovereign Digital Twins






















































































