


eRobotik
Konzepte der eRobotik revolutionieren den Entwicklungsprozess von der ersten Konzeption bis zum Betrieb und realisieren intelligente Systeme.
Anwendung
Die Konzepte der eRobotik sind anwendungs- und disziplinübergreifend. Konkret eingesetzt werden sie in den Bereichen Industrie, Umwelt und Weltraum.
Transfer
Ziel der Forschungsarbeiten am MMI ist es, einen Mehrwert für spätere Anwender zu schaffen. Entsprechend reichen die Arbeiten von der Grundlagenforschung bis zum Technologietransfer.
Unsere Forschungsthemen
Im Mittelpunkt der Arbeiten des MMI steht die Konzeption und Entwicklung neuer und anwendungsübergreifender Methoden der eRobotik und ihre Anwendung in den Bereichen Industrie, Umwelt und Weltraum.
Viele klassische und althergebrachte (produzierende) Industriezweige in Deutschland sind dringend auf eine Digitalisierung angewiesen. Die...

Unbemannte Flugobjekte oder UAVs (Unmanned Aerial Vehicles) werden am Institut für Mensch-Maschine Interaktion in diversen...
Die Entwicklung von immer fortschrittlicheren Fahrerassistenzsystemen und hochkomplexen autonomen Fahrzeugen stellt heutige Ingenieure vor immer...
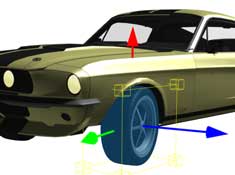
Zentrale Bedeutung unter den Simulationsalgorithmen hat die Simulation des dynamischen Verhaltens des mechanischen Systems.

Die "Virtuelle Inbetriebnahme" hat zum Ziel, komplexe Automatisierungsanlagen auf Basis digitaler Modelle und Methoden in...

Serviceroboter sind weltweit auf dem Vormarsch. Ihnen wird ein noch größeres Marktpotenzial vorhergesagt als den...

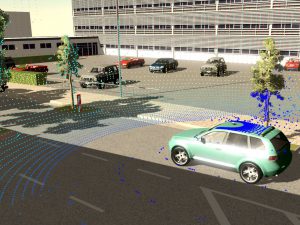
Sensoren sind zentraler Bestandteil nahezu jeder modernen (Automatisierungs-) Applikation.

Das Thema „Kinematik“ befasst sich mit der systematischen Beschreibung von Bewegungen und Bewegungsapparaten anhand ihrer...

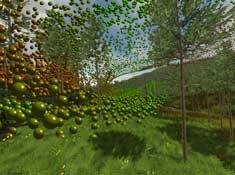
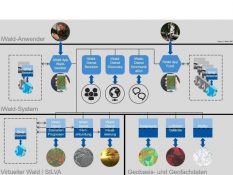
Die 3D-Simulation von Forstmaschinen ermöglicht ein gefahrloses und effizientes Training z. B. zum Zwecke der...

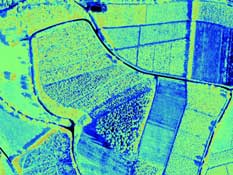
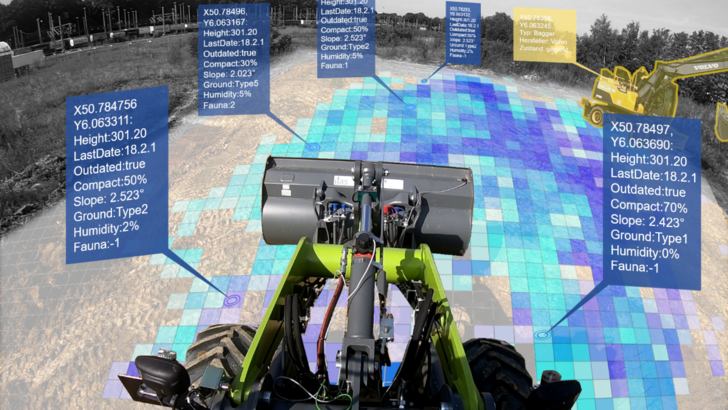
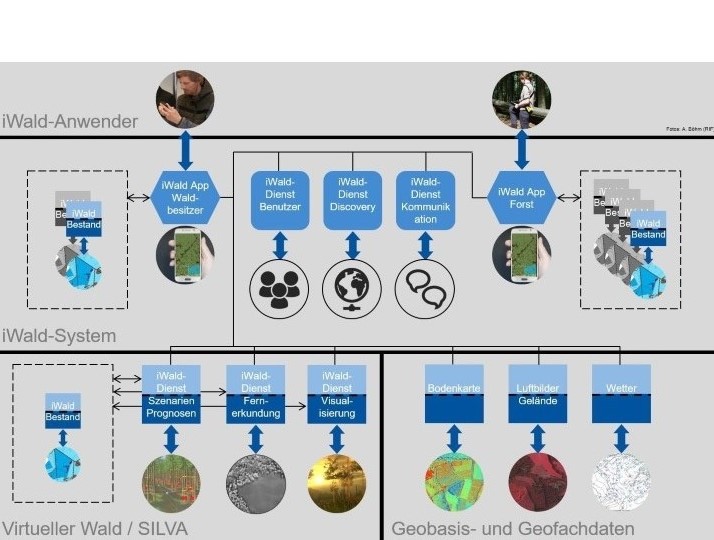
Mit dem Virtuellen Wald gehen in Nordrhein-Westfalen die sprichwörtlichen Zeiten, in denen man den Wald...

Beim Baumaschinensimulator steht die realitätsnahe Simulation der Maschinen selbst sowie insbesondere des Schüttgutes im Vordergrund....

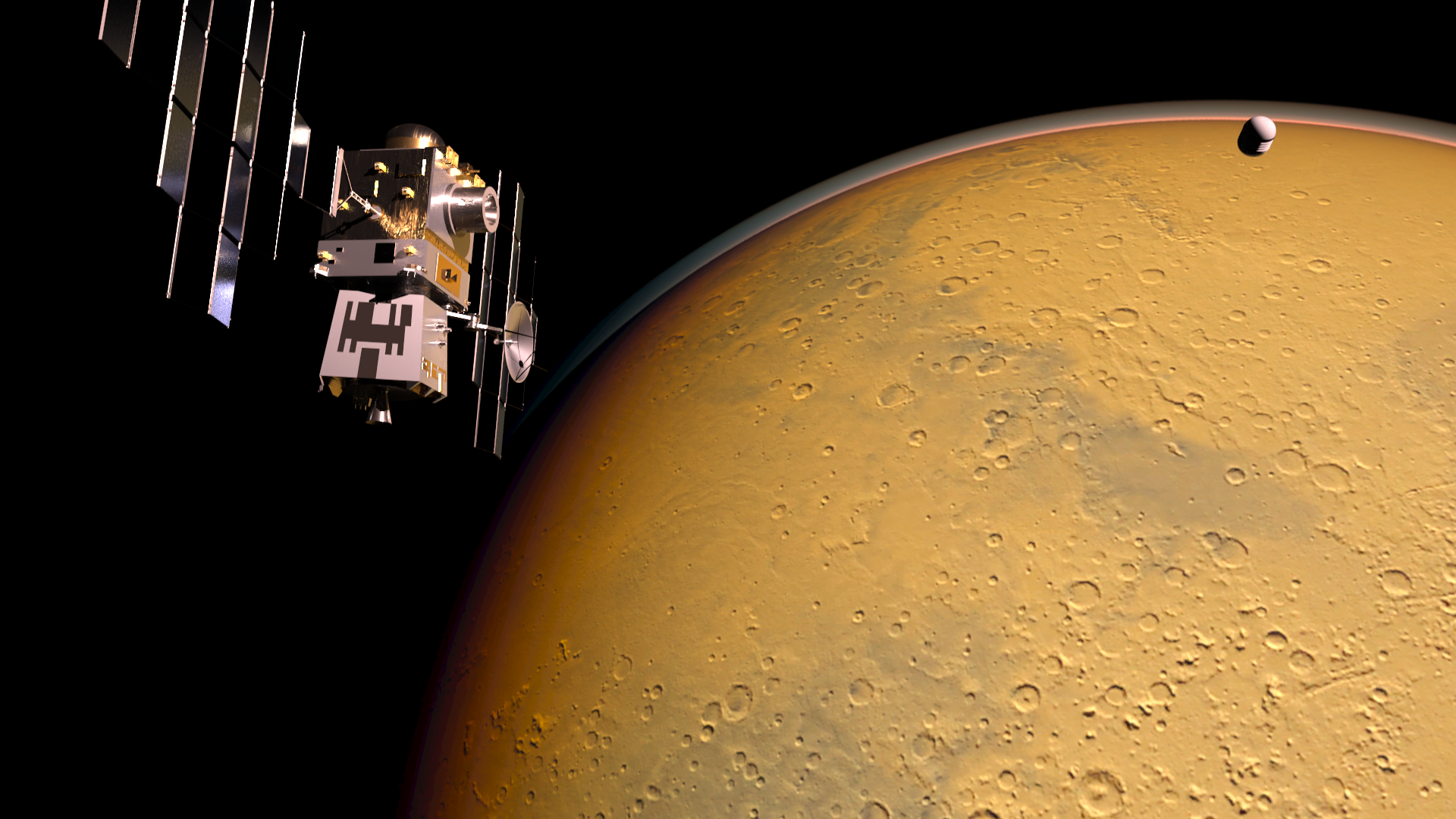
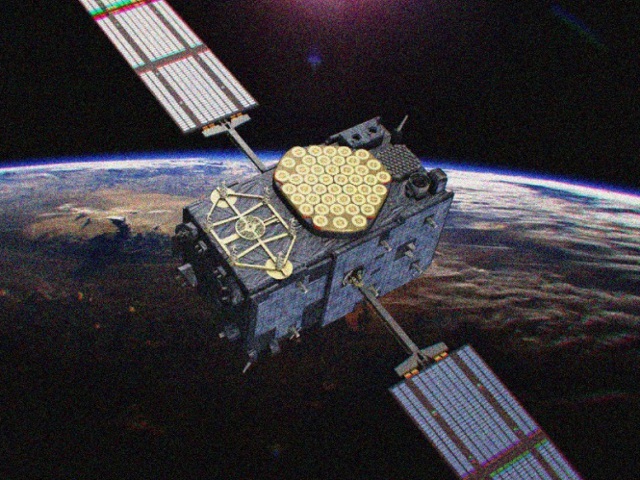
Ein Leben ohne Satelliten ist mittlerweile nicht mehr vorstellbar. Ob zur Positionsbestimmung, zur Erdbeobachtung oder...
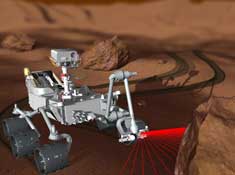
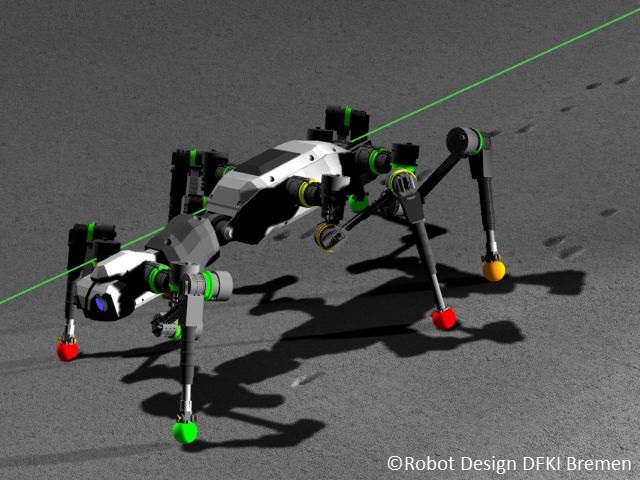
Roboter sind unverzichtbar bei der Erforschung von Planeten und der Exploration unseres Sonnensystems. Die Vororterkundung...

Mit der virtuellen Internationalen Raumstation hat das MMI ein umfassendes, begehbares und interaktives Modell der...

Ziel der Entwicklungen im Bereich eRobotik ist die Bereitstellung einer umfassenden Softwareumgebung zur Bearbeitung robotischer...
Modelle sind die Grundlage einer jeden Simulation und damit die Grundlage nahezu jeder eRobotik-Anwendung. Sie...
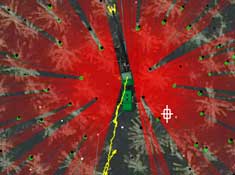
Eine wichtige Fragestellung bei der Realisierung unterschiedlichster Anwendungen ist die Bestimmung der absoluten Position einer...

Ein zentraler Aspekt nahezu jeder eRobotik-Applikation ist die grafische Darstellung/Visualisierung des Simulationszustands...

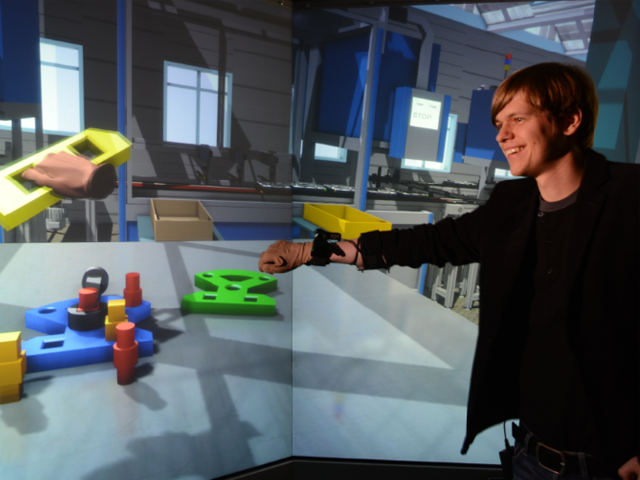
Intelligente Mensch-Maschine Schnittstellen stellen eine der Schlüsseltechnologien für Anwendungen in der...
Im Jahr 2007 zog der Orkan Kyrill über Europa und verursachte allein in Nordrhein-Westfalen Waldschäden...

Virtuelle Testbeds legen die Grundlagen für die Realisierung neuer Kristallisationspunkte zur effektiven und effizienten Zusammenführung...

Nahezu alle Methoden der eRobotik basieren auf dem Einsatz moderner 3D-Simulationstechnik. Basis hierfür ist ein...
Methoden des "Simulation-based Control" ermöglichen im Kontext der 3D-Simulationstechnik in Anwendungen der Robotik und Automatisierung...
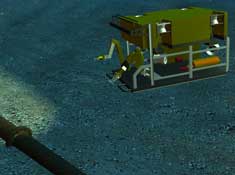
Die Entwicklung und der Betrieb autonomer Unterwasserfahrzeuge (AUV) ist eine komplexe, gefährliche und teure Aufgabe....

Bei der Mähdreschersimulation steht neben der realitätsnahen Simulation der Maschinen insbesondere die Simulation und Visualisierung...

Bei Virtual Reality-Anwendungen steht häufig das (audio-) visuelle Feedback der Simulation im Vordergrund. Für viele...
Handlungsplanung eröffnet neue Möglichkeiten der Interaktion zwischen Mensch und Robotern
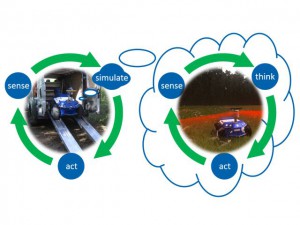
Das sogenannte Sense-Think-Act-Paradigma gilt als operative Definition eines (mobilen) Roboters...

Digitale Zwillinge - virtuelle digitale Repräsentanten physischer Assets - revolutionieren unsere Sicht auf Systeme.
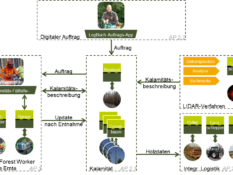
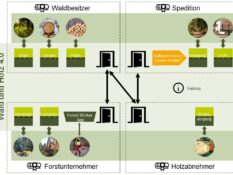
"Industrie 4.0"-Konzepte und -Methoden liefern dringend benötigte neue Ansätze, den Cluster Wald und Holz durch...
Projekte
Das MMI setzt sein Know-How in vielfältigen internationalen und nationalen Forschungsprojekten ein und entwickelt es weiter. Diese werden vom MMI gemeinsam und typischerweise interdisziplinär mit Kooperationspartnern aus Forschung, Behörden und Industrie bearbeitet. Für einige ausgewählte Projekte haben wir hier weiterführende Links zusammengestellt.

Living Lab für Präzision und Robotisierung im Obstbau Obstbauern in der Maas-Rhein-Region...

Sicheres KI-Framework für verbesserte Wassereffizienz und Widerstandsfähigkeit


Der Waldboden ist einer der wichtigsten Produktionsfaktoren für die Forstwirtschaft. Er bildet...
Ziel des Vorhabens SmaSiKaFE („Smarte und sichere Kalamitätsflächenernte“) ist es, die Ernte...

Die Holzernte als Teil der multifunktionalen Waldwirtschaft bewegt sich immer mehr im...
Das Projekt S3I-X zielt darauf ab, zwei entgegengesetzte Anforderungen zu vereinen. Auf...

Ziel des Projekts DigiKomForst ist die Erstellung eines prototypischen Systems zum einfachen...
Ziel des Forschungsvorhabens CO2For-IT ist die Entwicklung, prototypische Umsetzung und praktische Erprobung...

Weiterentwicklung und Adaption des BaSys-4-Systems zur Anwendung in der Forstwirtschaft Unternehmensübergreifende Verknüpfung...

In AsTeDiF wird ein Assistenzsystem zur Unterstützung des Maschinenbedieners in betrieblichen Trainings-...
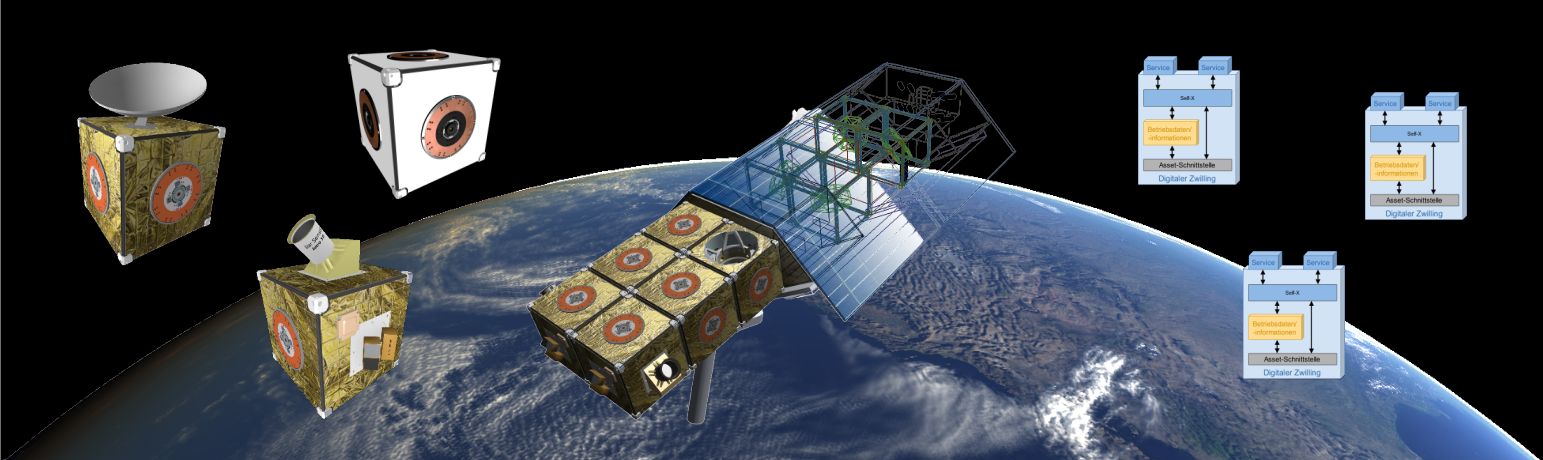
Das Twins4Space-Projekt entwickelt eine dezentrale Softwareplattform zur Orchestrierung von Digitalen Zwillingen und...
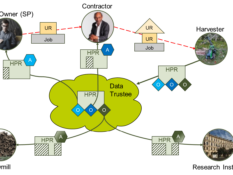
Ein Datentreuhandmodell für die Forstwirtschaft mit dem Ziel, vertrauensvolles, transparentes und sicheres...
Das Projekt „Climate Community for Wind“ (CC4Wind) untersucht die Akzeptanz von Windkraft....
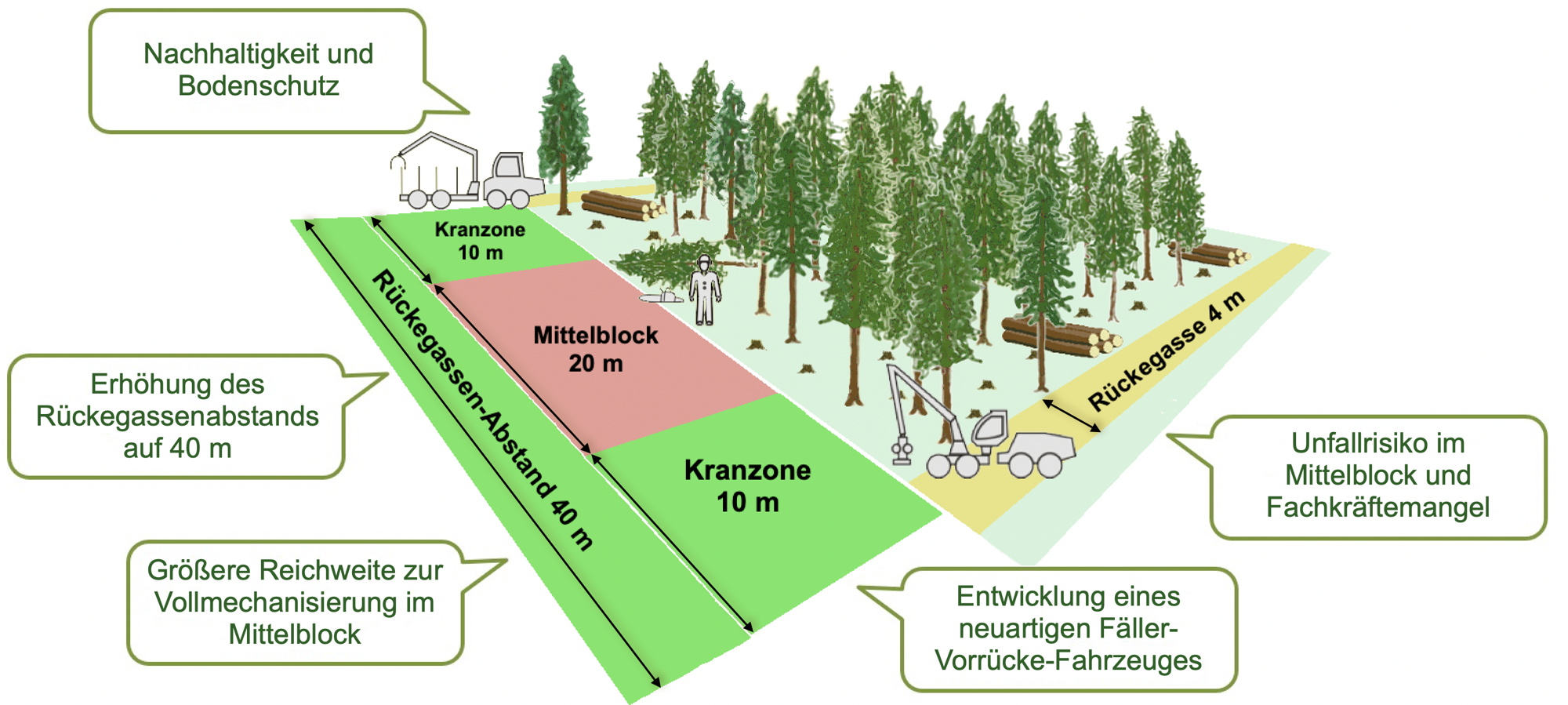
Verbundvorhaben zur Entwicklung, prototypischen Umsetzung und Bewertung eines neuen Maschinenkonzepts zur Mechanisierung...

Fusion von Maschinen- und Geodaten in Digitalen Zwillingen von Infrastrukturobjekten und deren...

Entwicklung einer neuartigen, digitalisierten Fertigungsstrategie für die automatisierte Produktion individualisierter FVK-Bauteile (IFVK)...
Eine Tuftingmaschine bestickt ein Trägermaterial durch das Zusammenspiel von Nadel, Greifer und...


Training und Validierung von KI-Algorithmen mittels massiv-paralleler Ausführung Digitaler Zwillinge
Entwicklung eines innovativen Waldentwicklungs- und Dienstleistungskonzepts zur Optimierung ...


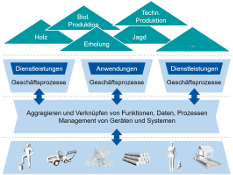
Charakteristisch für den Branchencluster Wald und Holz ist die Vielschichtigkeit und Heterogenität...

Die Entwicklung neuer Sensorhard- und -software im ViTOS-Testbed ist der erste Schritt...

Basierend auf dem didaktischen FeDiNAR-Konzept werden mittels Digitaler Zwillinge der Lernenden und...

Ziel von ClusterWIS ist die Etablierung eines nachhaltigen Rohstoffmanagements und einer effizienten...
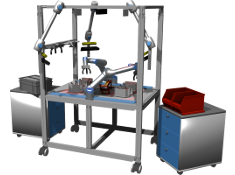

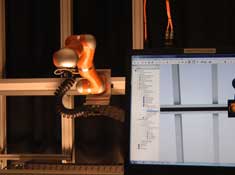
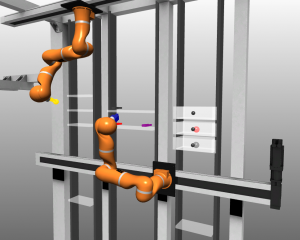
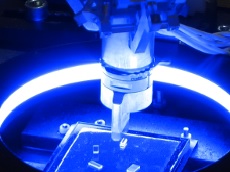
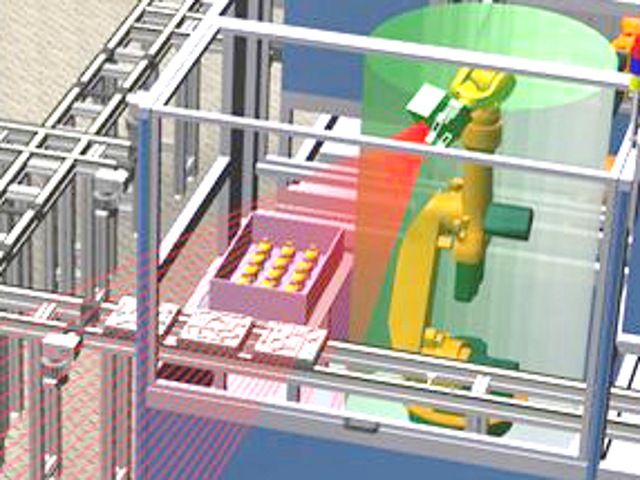
Im Projekt "ReconCell" wird eine neuartige Roboterzelle zur automatisierten Montage entwickelt, die...
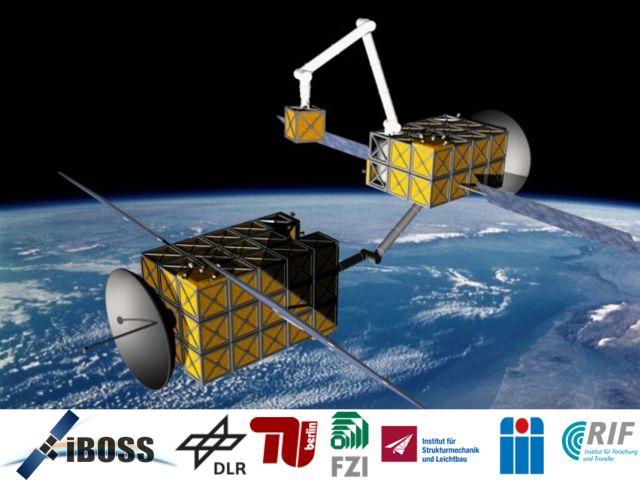

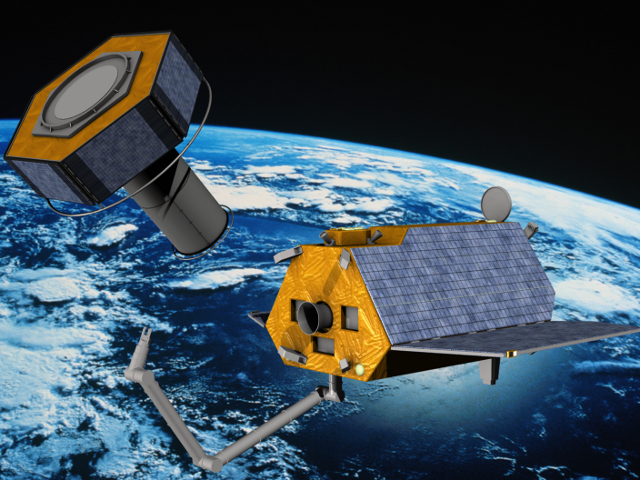
Heutige Satelliten sind meist monolithische Systeme ohne die Möglichkeit zur Wartung, Instandhaltung...

Im Rahmen des Projekts Virtual Crater wurde eine virtuellen Testumgebung entwickelt, die...
Das Projekt SCALAB (Scalable Automation for Emerging Lab Production) hat zum Ziel,...

Die Projektserie „ProPemo“ beschäftigt sich mit der Roboterprogrammierung „by Demonstration“, bzw. der...
Grundlage für die im Rahmen von INVIRTES (Integrierte Entwicklung komplexer Systeme mit...
Optische Sensoren sind unverzichtbar in nahezu allen Raumfahrtanwendungen. Im Rahmen robotischer...

Im Projekt SELOK wurde untersucht, wie die Landmarken von einem mobilen Roboter...
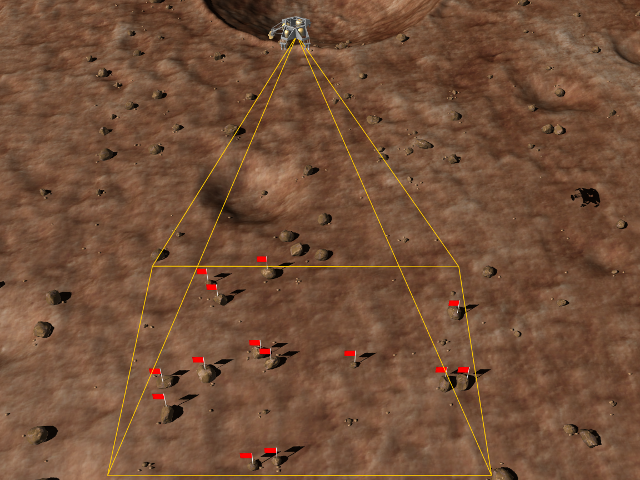

Eine wichtige Fragestellung bei der Exploration fremder Planeten durch in großen Teilen...
Ziel des DeLas-Projekts ist die deutliche Reduktion der Entwicklungszeit für die automatisierte...

Katastrophen wie das Reaktorunglück von Fukushima zeigen deutlich, dass die Fähigkeiten aktueller...
Mit dem Virtuellen Wald gehen in Nordrhein-Westfalen die sprichwörtlichen Zeiten, in denen...
Das Projekt "IntellAct" addressiert das Problem, Objektmanipulationen auf der Signal- und der...
Veröffentlichungen
Vielfältige Veröffentlichungen dokumentieren die Forschungsarbeiten sowohl im wissenschaftlichen Bereich als auch in anwendungsnahen Publikationen.

