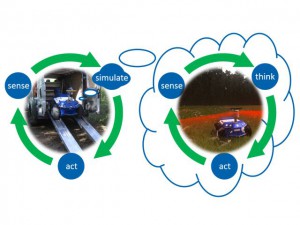
Das sogenannte Sense-Think-Act-Paradigma gilt als operative Definition eines (mobilen) Roboters. Ein besonderer Aspekt der mobilen Robotik ist die Interaktion des Roboters mit seiner veränderlichen, oft unbekannten und unstrukturierten Umgebung. Diese muss mit entsprechender Sensorik erfasst und mit geeigneten Algorithmen mit semantischer Bedeutung versehen werden (Sense). Für vollständig autonome Systeme sind moderne Methoden der künstlichen Intelligenz von Bedeutung (Think), z. B. zur Selbstlokalisation, Navigation und Handlungsplanung. Zur Bewegung in verschiedensten Umgebungen sind unterschiedlichste Antriebstechniken notwendig und die Manipulation der Umwelt
erfordert häufig hoch redundante Kinematiken mit der entsprechend komplexen Regelung (Act). Dies macht deutlich, dass mobile Robotik ein multidisziplinäres Forschungsgebiet ist und damit von der Nutzung Virtueller Testbeds profitieren wird. Ein weiterer wesentlicher Aspekt dabei ist, dass das Virtuelle Testbed eine Simulation der Interaktion des digitalen Prototypen mit seiner Umwelt bietet. So wie sich das Sense-Think-Act-Paradigma am Menschen orientiert, sollte sich auch der „Denkprozess“ des Roboters am Menschen orientieren. Der Mensch konstruiert auf Basis seiner Wahrnehmung und Erfahrungen ein „Mentales Modell“, anhand dessen er in der Lage ist, verschiedene Handlungsalternativen vollständig zu durchdenken, d.h. sich auch die aus seiner Handlung resultierenden Folgen vorzustellen. Die Forschung im Bereich Simulation-based Reasoning soll dazu beitragen, diese Fähigkeit auf den Roboter zu übertragen. Dafür muss der komplette Sense-Think-Act-Zyklus in der Simulation abgebildet werden können. Der ursprüngliche Denkprozess muss um die Simulation erweitert werden (aus Think wird Simulate), sodass der Roboter verschiedene Handlungspfade (Folgen von Aktionen) simulieren und dann anhand einer vordefinierten Gütefunktion den optimalen Handlungspfad auswählen und durchführen kann. Analog zum Mentalen Modell des Menschen ist dafür ein virtuelles Modell des Roboters und seiner Umgebung erforderlich. Bei der modellprädiktiven Regelung (engl.: Model Predictive Control, MPC) wird ein dynamisches Modell des zu regelnden Systems verwendet, um die Reaktion des Systems auf unterschiedliche Eingangssignale vorherzusagen. Dadurch können die Eingangssignale im Rahmen des gewählten Zeithorizonts optimal bestimmt werden. MPC wird üblicherweise zur Regelung verfahrenstechnischer Prozesse eingesetzt. Durch die Bereitstellung realitätsnaher virtueller Welten als Mentale Modelle kann das Konzept der MPC zu einer simulationsbasierten Handlungsplanung erweitert werden. Dabei stellt das Modell aus Roboter und Umwelt höchste Ansprüche an die 3D-Simulationstechnik, die mit Methoden Virtueller Testbeds am besten erfüllt werden können. Idealerweise ergeben sich Synergieeffekte, wenn bereits ein Virtuelles Testbed für die Entwicklung des Roboters eingesetzt wurde und dieses Modell anschließend in der operativen Phase als Mentales Modell eingesetzt werden kann. Dieses Mentale Modell soll damit nicht nur Regelung, sondern auch Handlungsplanung und damit eine deutliche Steigerung der Autonomie mobiler Roboter ermöglichen.
(entnommen aus: [Rast, Malte: „Domänenübergreifende Modellierung und Simulation als Grundlage für Virtuelle Testbeds“, Dissertation, RWTH Aachen University, 2014, ISBN 987-3-86359-283-7])
Weitere Forschungsthemen
Viele klassische und althergebrachte (produzierende) Industriezweige in Deutschland sind dringend auf eine Digitalisierung angewiesen. Die...

Unbemannte Flugobjekte oder UAVs (Unmanned Aerial Vehicles) werden am Institut für Mensch-Maschine Interaktion in diversen...
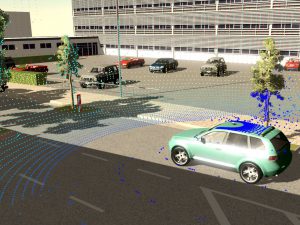
Die Entwicklung von immer fortschrittlicheren Fahrerassistenzsystemen und hochkomplexen autonomen Fahrzeugen stellt heutige Ingenieure vor immer...
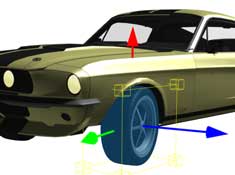
Zentrale Bedeutung unter den Simulationsalgorithmen hat die Simulation des dynamischen Verhaltens des mechanischen Systems.

Die "Virtuelle Inbetriebnahme" hat zum Ziel, komplexe Automatisierungsanlagen auf Basis digitaler Modelle und Methoden in...

Serviceroboter sind weltweit auf dem Vormarsch. Ihnen wird ein noch größeres Marktpotenzial vorhergesagt als den...

Sensoren sind zentraler Bestandteil nahezu jeder modernen (Automatisierungs-) Applikation.

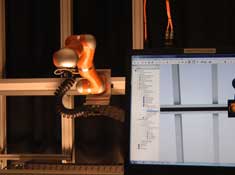
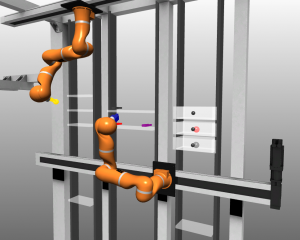
Das Thema „Kinematik“ befasst sich mit der systematischen Beschreibung von Bewegungen und Bewegungsapparaten anhand ihrer...

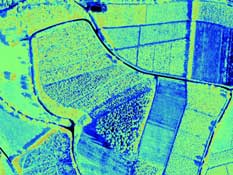
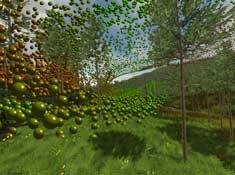
Die 3D-Simulation von Forstmaschinen ermöglicht ein gefahrloses und effizientes Training z. B. zum Zwecke der...

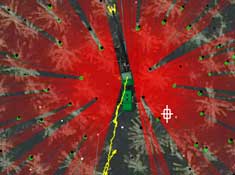
Mit dem Virtuellen Wald gehen in Nordrhein-Westfalen die sprichwörtlichen Zeiten, in denen man den Wald...

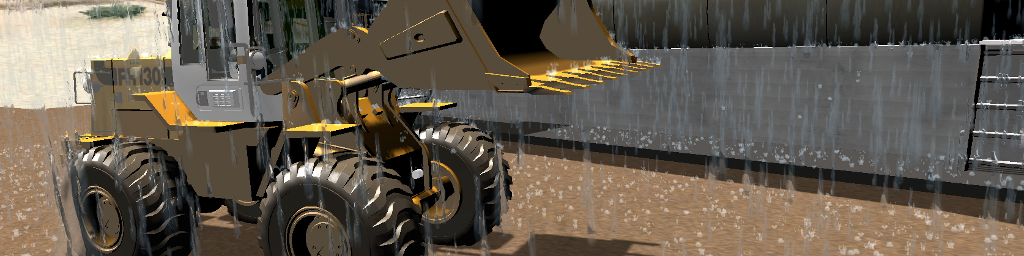
Beim Baumaschinensimulator steht die realitätsnahe Simulation der Maschinen selbst sowie insbesondere des Schüttgutes im Vordergrund....

Ein Leben ohne Satelliten ist mittlerweile nicht mehr vorstellbar. Ob zur Positionsbestimmung, zur Erdbeobachtung oder...
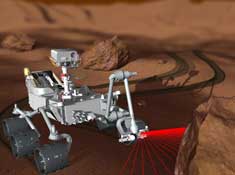
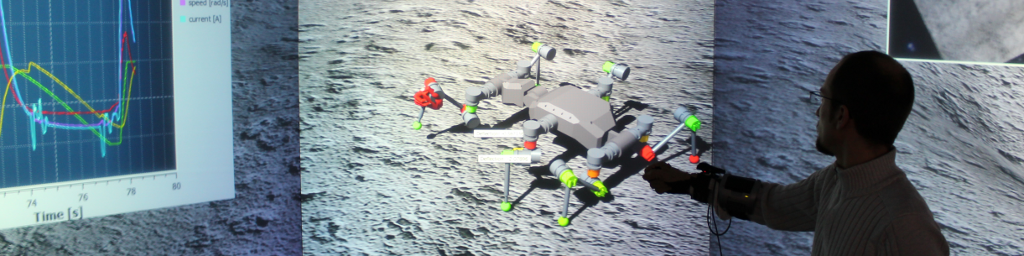
Roboter sind unverzichtbar bei der Erforschung von Planeten und der Exploration unseres Sonnensystems. Die Vororterkundung...

Mit der virtuellen Internationalen Raumstation hat das MMI ein umfassendes, begehbares und interaktives Modell der...

Ziel der Entwicklungen im Bereich eRobotik ist die Bereitstellung einer umfassenden Softwareumgebung zur Bearbeitung robotischer...
Modelle sind die Grundlage einer jeden Simulation und damit die Grundlage nahezu jeder eRobotik-Anwendung. Sie...
Eine wichtige Fragestellung bei der Realisierung unterschiedlichster Anwendungen ist die Bestimmung der absoluten Position einer...

Ein zentraler Aspekt nahezu jeder eRobotik-Applikation ist die grafische Darstellung/Visualisierung des Simulationszustands...

Intelligente Mensch-Maschine Schnittstellen stellen eine der Schlüsseltechnologien für Anwendungen in der...
Im Jahr 2007 zog der Orkan Kyrill über Europa und verursachte allein in Nordrhein-Westfalen Waldschäden...

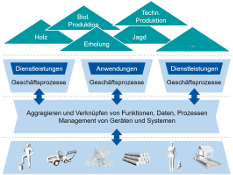
Virtuelle Testbeds legen die Grundlagen für die Realisierung neuer Kristallisationspunkte zur effektiven und effizienten Zusammenführung...

Nahezu alle Methoden der eRobotik basieren auf dem Einsatz moderner 3D-Simulationstechnik. Basis hierfür ist ein...
Methoden des "Simulation-based Control" ermöglichen im Kontext der 3D-Simulationstechnik in Anwendungen der Robotik und Automatisierung...
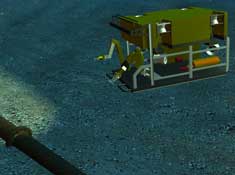
Die Entwicklung und der Betrieb autonomer Unterwasserfahrzeuge (AUV) ist eine komplexe, gefährliche und teure Aufgabe....

Bei der Mähdreschersimulation steht neben der realitätsnahen Simulation der Maschinen insbesondere die Simulation und Visualisierung...

Bei Virtual Reality-Anwendungen steht häufig das (audio-) visuelle Feedback der Simulation im Vordergrund. Für viele...
Handlungsplanung eröffnet neue Möglichkeiten der Interaktion zwischen Mensch und Robotern
Das sogenannte Sense-Think-Act-Paradigma gilt als operative Definition eines (mobilen) Roboters...

Digitale Zwillinge - virtuelle digitale Repräsentanten physischer Assets - revolutionieren unsere Sicht auf Systeme.
"Industrie 4.0"-Konzepte und -Methoden liefern dringend benötigte neue Ansätze, den Cluster Wald und Holz durch...


{kind=link}
{kind=link}
{kind=link}
{kind=link}