
Digitale Zwillinge revolutionieren unsere Sicht auf technische Systeme
Digitale Zwillinge sind virtuelle digitale Repräsentanten physischer Assets (z.B. Maschinen, Fahrzeuge, Häuser oder Bäume) oder realer Subjekte (z.B. Menschen oder Softwarekomponenten). Sie sind zugleich Ergebnis und Grundlage der Digitalisierung.
Digitale Zwillinge sind interdisziplinär, domänen-, system‑, prozess- und anwendungsübergreifend. Sie beschreiben ihren realen Zwilling umfassend über Metadaten, Digitale Modelle und Betriebsdaten. Sie prognostizieren sein Verhalten und integrieren ihn über Kommunikationsschnittstellen in das Internet der Dinge.
Digitale Zwillinge integrieren Systeme. Über die Vernetzung von Digitalen Zwillingen untereinander und mit der Realität werden Systeme entwickelt, Einsatzszenarien definiert und simulationsgestützte Anwendungen realisiert.
Digitale Zwillinge strukturieren und integrieren den (Entwicklungs-) Prozess. Von der Idee über Spezifikation, Analyse, Optimierung, Test, Verifikation & Validierung unterschiedlicher Realisierungen bis zur Inbetriebnahme basieren alle Arbeiten und Entscheidungen auf gemeinsamen Digitalen Zwillingen, die aus unterschiedlichen Perspektiven betrachtet werden.
Digitale Zwillinge realisieren intelligente Systeme. Sie kennen ihre Historie, ihren aktuellen Zustand und alternative Wege zum Ziel. Sie arbeiten dezentral und selbständig, tauschen eigenständig Informationen aus, koordinieren sich selbständig mit anderen, erkennen Situationen frühzeitig und agieren dann rechtzeitig. Sie sind die Knoten des Internets der Dinge und Dienste.

Digitale Zwillinge sind Grundlage für effektive und effiziente Mensch-Maschine-Interaktion. Sie eröffnen allen Beteiligten vom Entwickler bis zum Bediener einen intuitiven Zugang zu komplexen Sachverhalten. Sie sind Grundlage für zielgerichtete Steuerung und sichere Überwachung der realen Systeme sowie für die optimierte Ausführung von Bedienanweisungen.

Virtuelle Testbeds erwecken Digitale Zwillinge zum Leben
Die Realisierung Digitaler Zwillinge erfordert eine aktive Integrationsplattform, die alle über den gesamten Lebenszyklus entstehenden (Entwicklungs- und Betriebs-) Daten in Digitalen Zwillingen zusammenführt und zueinander in Verbindung setzt. Sie muss deren Verhalten prognostizieren, auf dieser Grundlage Entscheidungen treffen und diese in Systeme und Prozesse integrieren. Genau dies leistet das Virtuelle Testbed als interdisziplinäre, domänen-, system-, prozess- und anwendungsübergreifende Integrationsplattform zur Realisierung umfassender Digitaler Zwillinge. Das Virtuelle Testbed erweckt Digitale Zwillinge zum Leben, macht sie ausführbar, experimentierbar und integrierbar. Aus Digitalen Zwillingen werden Experimentierbare Digitale Zwillinge. Hierzu kombiniert das Virtuelle Testbed die jeweils benötigten Modelle, Daten und Simulationsverfahren und integriert diese über die Kommunikationsschnittstellen der Digitalen Zwillinge sowohl in übergeordnete Prozesse als auch in reale Systeme.
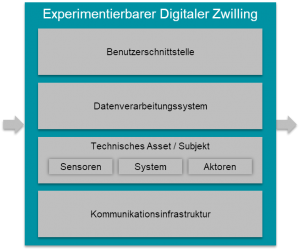
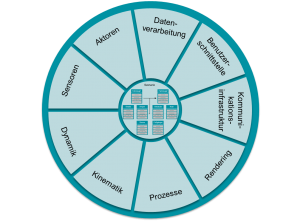
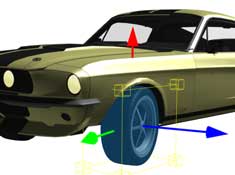
Digitale Zwillinge im Virtuellen Testbed bilden reale Zwillinge hinsichtlich Struktur und Verhalten 1-zu-1 ab. Sie umfassen digitale Repräsentanten technischer Assets und Subjekte, Datenverarbeitungssysteme, Benutzerschnittstellen und Kommunikationsinfrastrukturen. Sie verfügen über Schnittstellen (IT, Elektrik/Elektronik, Mechanik …), die sie mit ihrer Umgebung kommunizieren lassen.
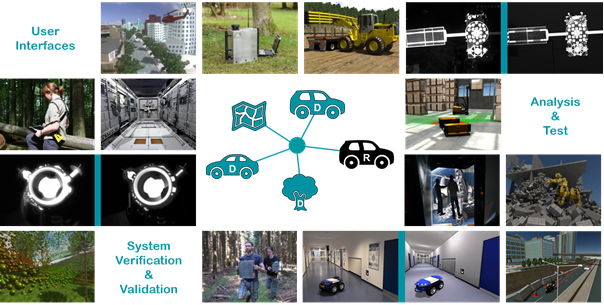
Einsatzszenarien entstehen durch Kombination und Vernetzung von Digitalen Zwillingen. Diese sind explizit über ihre Schnittstellen miteinander verbunden und interagieren implizit über die gemeinsame Simulation (z. B. durch Kollisionen oder als Messobjekte von Sensoren). Digitale Zwillinge können ohne Änderung in unterschiedlichen Einsatzszenarien unterschiedlicher Anwendungsbereiche eingesetzt werden.

Diese Netzwerke werden in ihrer Gesamtheit simuliert. Simulationsmodelle der Digitalen Zwillinge werden analysiert, zusammengeführt und in gekoppelten Simulationen ausgeführt. Ausgangspunkt sind bestehende wie neue Simulationsverfahren, die geeignet kombiniert werden. Im Mittelpunkt der Simulation steht das System in seiner Einsatzumgebung, integriert in die jeweilige Anwendung.
Grundlage hierfür ist eine anwendungsneutrale Simulationsplattform, die Daten und Datenquellen kombiniert, Simulationsverfahren integriert, Kommunikationsinfrastrukturen bereitstellt und gekoppelte Simulationen realisiert. Durch die Mikrokernel-Architektur ist maximale Flexibilität und Portabilität zur Realisierung vielfältiger simulationsgestützter Anwendungen garantiert.
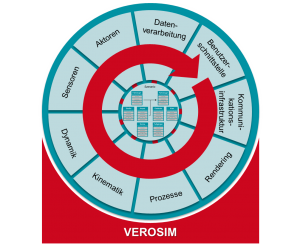
Diese Seite zum Download Digitale Zwillinge in VEROSIM Automotive
Weitere Forschungsthemen
Viele klassische und althergebrachte (produzierende) Industriezweige in Deutschland sind dringend auf eine Digitalisierung angewiesen. Die...

Unbemannte Flugobjekte oder UAVs (Unmanned Aerial Vehicles) werden am Institut für Mensch-Maschine Interaktion in diversen...
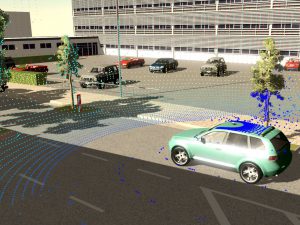
Die Entwicklung von immer fortschrittlicheren Fahrerassistenzsystemen und hochkomplexen autonomen Fahrzeugen stellt heutige Ingenieure vor immer...
Zentrale Bedeutung unter den Simulationsalgorithmen hat die Simulation des dynamischen Verhaltens des mechanischen Systems.

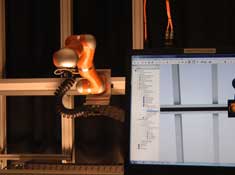
Die "Virtuelle Inbetriebnahme" hat zum Ziel, komplexe Automatisierungsanlagen auf Basis digitaler Modelle und Methoden in...

Serviceroboter sind weltweit auf dem Vormarsch. Ihnen wird ein noch größeres Marktpotenzial vorhergesagt als den...

Sensoren sind zentraler Bestandteil nahezu jeder modernen (Automatisierungs-) Applikation.

Das Thema „Kinematik“ befasst sich mit der systematischen Beschreibung von Bewegungen und Bewegungsapparaten anhand ihrer...

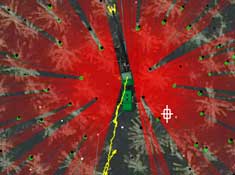
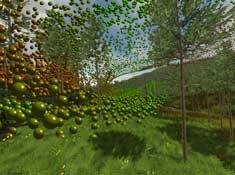
Die 3D-Simulation von Forstmaschinen ermöglicht ein gefahrloses und effizientes Training z. B. zum Zwecke der...

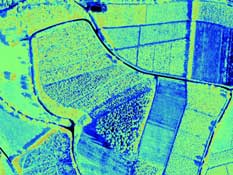
Mit dem Virtuellen Wald gehen in Nordrhein-Westfalen die sprichwörtlichen Zeiten, in denen man den Wald...

Beim Baumaschinensimulator steht die realitätsnahe Simulation der Maschinen selbst sowie insbesondere des Schüttgutes im Vordergrund....

Ein Leben ohne Satelliten ist mittlerweile nicht mehr vorstellbar. Ob zur Positionsbestimmung, zur Erdbeobachtung oder...
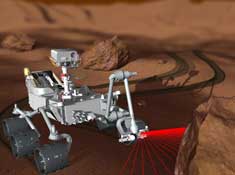
Roboter sind unverzichtbar bei der Erforschung von Planeten und der Exploration unseres Sonnensystems. Die Vororterkundung...

Mit der virtuellen Internationalen Raumstation hat das MMI ein umfassendes, begehbares und interaktives Modell der...

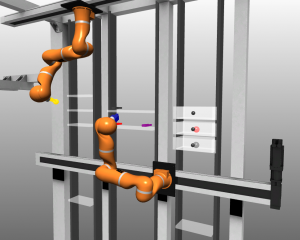
Ziel der Entwicklungen im Bereich eRobotik ist die Bereitstellung einer umfassenden Softwareumgebung zur Bearbeitung robotischer...
Modelle sind die Grundlage einer jeden Simulation und damit die Grundlage nahezu jeder eRobotik-Anwendung. Sie...
Eine wichtige Fragestellung bei der Realisierung unterschiedlichster Anwendungen ist die Bestimmung der absoluten Position einer...

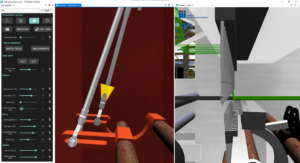
Ein zentraler Aspekt nahezu jeder eRobotik-Applikation ist die grafische Darstellung/Visualisierung des Simulationszustands...

Intelligente Mensch-Maschine Schnittstellen stellen eine der Schlüsseltechnologien für Anwendungen in der...
Im Jahr 2007 zog der Orkan Kyrill über Europa und verursachte allein in Nordrhein-Westfalen Waldschäden...

Virtuelle Testbeds legen die Grundlagen für die Realisierung neuer Kristallisationspunkte zur effektiven und effizienten Zusammenführung...

Nahezu alle Methoden der eRobotik basieren auf dem Einsatz moderner 3D-Simulationstechnik. Basis hierfür ist ein...
Methoden des "Simulation-based Control" ermöglichen im Kontext der 3D-Simulationstechnik in Anwendungen der Robotik und Automatisierung...
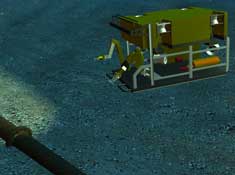
Die Entwicklung und der Betrieb autonomer Unterwasserfahrzeuge (AUV) ist eine komplexe, gefährliche und teure Aufgabe....

Bei der Mähdreschersimulation steht neben der realitätsnahen Simulation der Maschinen insbesondere die Simulation und Visualisierung...

Bei Virtual Reality-Anwendungen steht häufig das (audio-) visuelle Feedback der Simulation im Vordergrund. Für viele...
Handlungsplanung eröffnet neue Möglichkeiten der Interaktion zwischen Mensch und Robotern
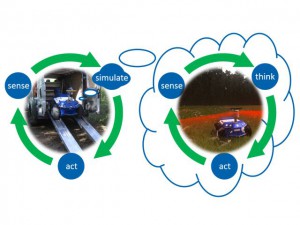
Das sogenannte Sense-Think-Act-Paradigma gilt als operative Definition eines (mobilen) Roboters...

Digitale Zwillinge - virtuelle digitale Repräsentanten physischer Assets - revolutionieren unsere Sicht auf Systeme.
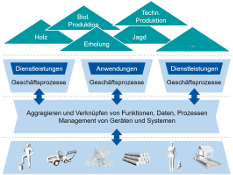
"Industrie 4.0"-Konzepte und -Methoden liefern dringend benötigte neue Ansätze, den Cluster Wald und Holz durch...

{kind=link}
{kind=link}
{kind=link}