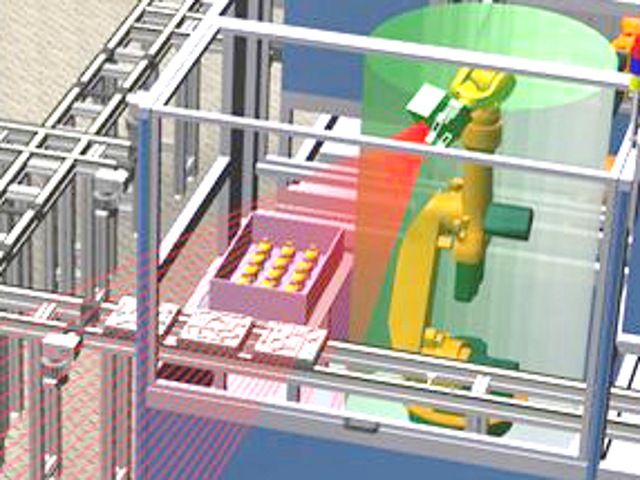
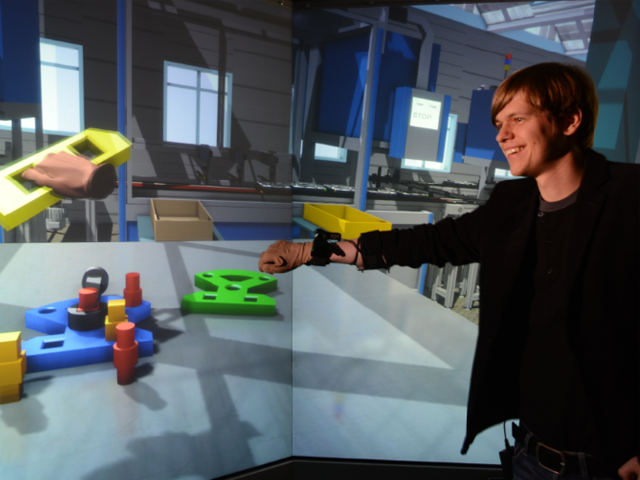
In dem Projekt „IntellAct“ wird ein System entwickelt, das von Menschen demonstrierte Montageaufgaben durch Beobachtung erlernen und mit Robotern wiedergeben kann. Ein derartiges intelligentes System kann dann genutzt werden, um beispielsweise industrielle Roboter ohne konventionelle Roboterprogrammierung schneller zum Einsatz zu bringen oder um kritische Montageaufgaben zum Beispiel an Bord der Internationalen Raumstation mit Robotern überwachen und unterstützen zu können.
Fachlich besteht eine große Herausforderung dabei darin, die detaillierte Signalebene der Handhabung (Trajektorien, Kräfte und Momente) mit der abstrakten Symbolebene zu verbinden, auf der ein Erlernen und „Verstehen“ der Montagesituation erzielt wird. Vom Projektteam wurde dazu ein Konzept entwickelt, um eine beobachtete menschliche Handhabung über mehrere Stufen zu interpretieren und zu abstrahieren, ohne wesentliche Details zu verlieren, die zur Ausführung durch Roboter notwendig sind.
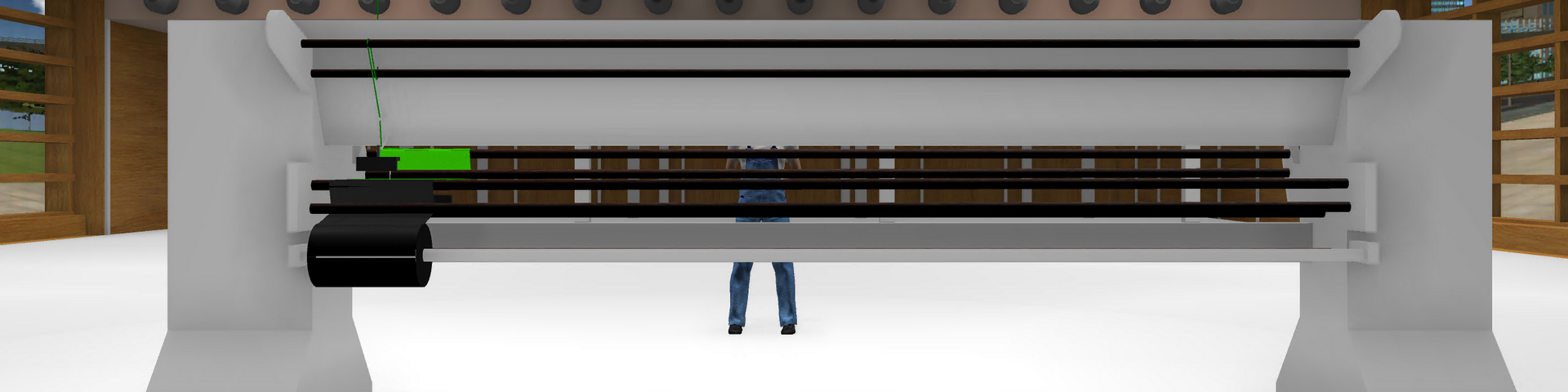
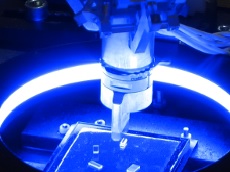
Der Beitrag des MMI in „IntellAct“ besteht darin, ein Virtuelles Testbed bereitzustellen, in dem Systemkomponenten unter kontrollierten, idealen Bedingungen entwickelt und trainiert werden können. So werden beispielsweise die Sensor- und Lernalgorithmen in der Virtuellen Realität trainiert, indem der Trainer Montageaufgaben mit Datenhandschuhen durchführt und dabei Fehlerfaktoren wie Sensorrauschen und Fehlgriffe einstellen und prüfen kann. Auf diese Weise tragen die Arbeiten des MMI in „IntellAct“ insbesondere dazu bei, dass bereits frühzeitig im Projekt die Entwicklung von „high-level“ Komponenten begonnen wurde, die üblicherweise erst nach Auswahl, Installation und Inbetriebnahme der Sensorhardware starten kann.
Siehe http://intellact.sdu.dk/.
Weitere Projekte

Living Lab für Präzision und Robotisierung im Obstbau Obstbauern in der Maas-Rhein-Region...

Sicheres KI-Framework für verbesserte Wassereffizienz und Widerstandsfähigkeit


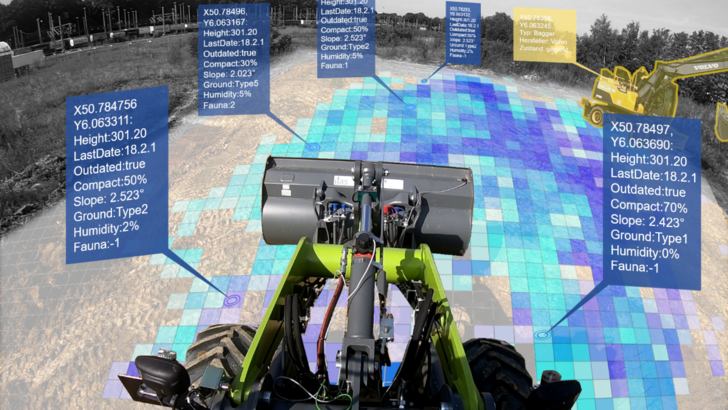
Der Waldboden ist einer der wichtigsten Produktionsfaktoren für die Forstwirtschaft. Er bildet...
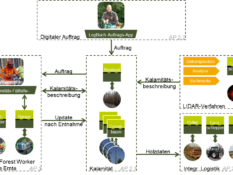
Ziel des Vorhabens SmaSiKaFE („Smarte und sichere Kalamitätsflächenernte“) ist es, die Ernte...

Die Holzernte als Teil der multifunktionalen Waldwirtschaft bewegt sich immer mehr im...
Das Projekt S3I-X zielt darauf ab, zwei entgegengesetzte Anforderungen zu vereinen. Auf...

Ziel des Projekts DigiKomForst ist die Erstellung eines prototypischen Systems zum einfachen...
Ziel des Forschungsvorhabens CO2For-IT ist die Entwicklung, prototypische Umsetzung und praktische Erprobung...

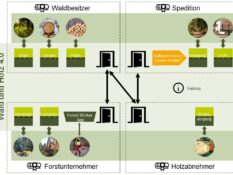
Weiterentwicklung und Adaption des BaSys-4-Systems zur Anwendung in der Forstwirtschaft Unternehmensübergreifende Verknüpfung...

In AsTeDiF wird ein Assistenzsystem zur Unterstützung des Maschinenbedieners in betrieblichen Trainings-...
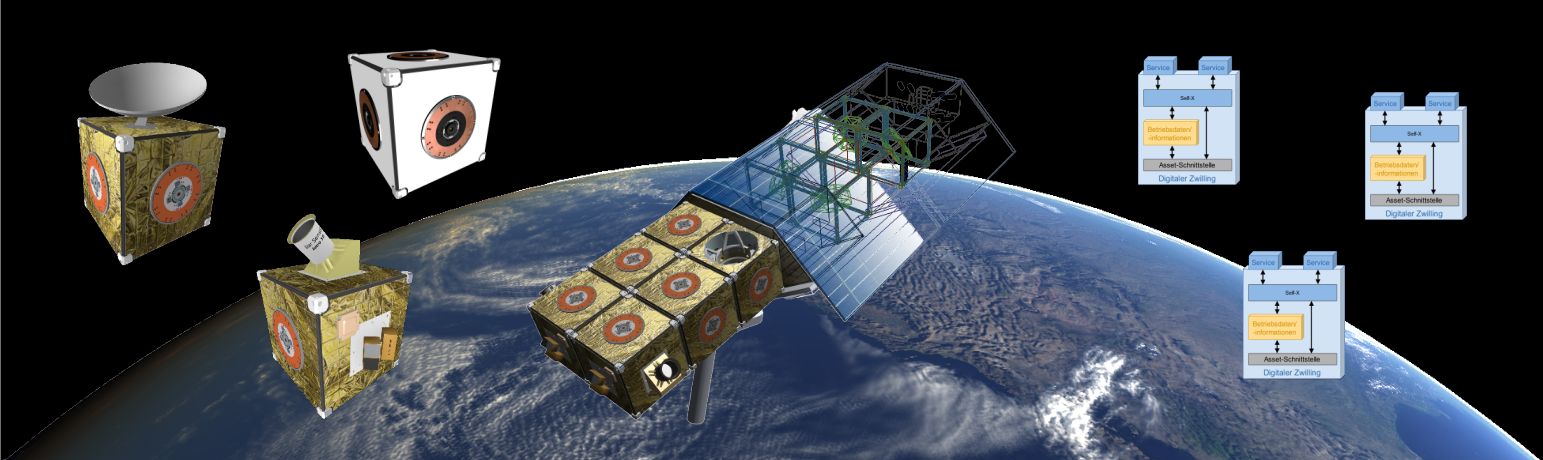
Das Twins4Space-Projekt entwickelt eine dezentrale Softwareplattform zur Orchestrierung von Digitalen Zwillingen und...
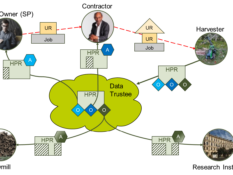
Ein Datentreuhandmodell für die Forstwirtschaft mit dem Ziel, vertrauensvolles, transparentes und sicheres...
Das Projekt „Climate Community for Wind“ (CC4Wind) untersucht die Akzeptanz von Windkraft....
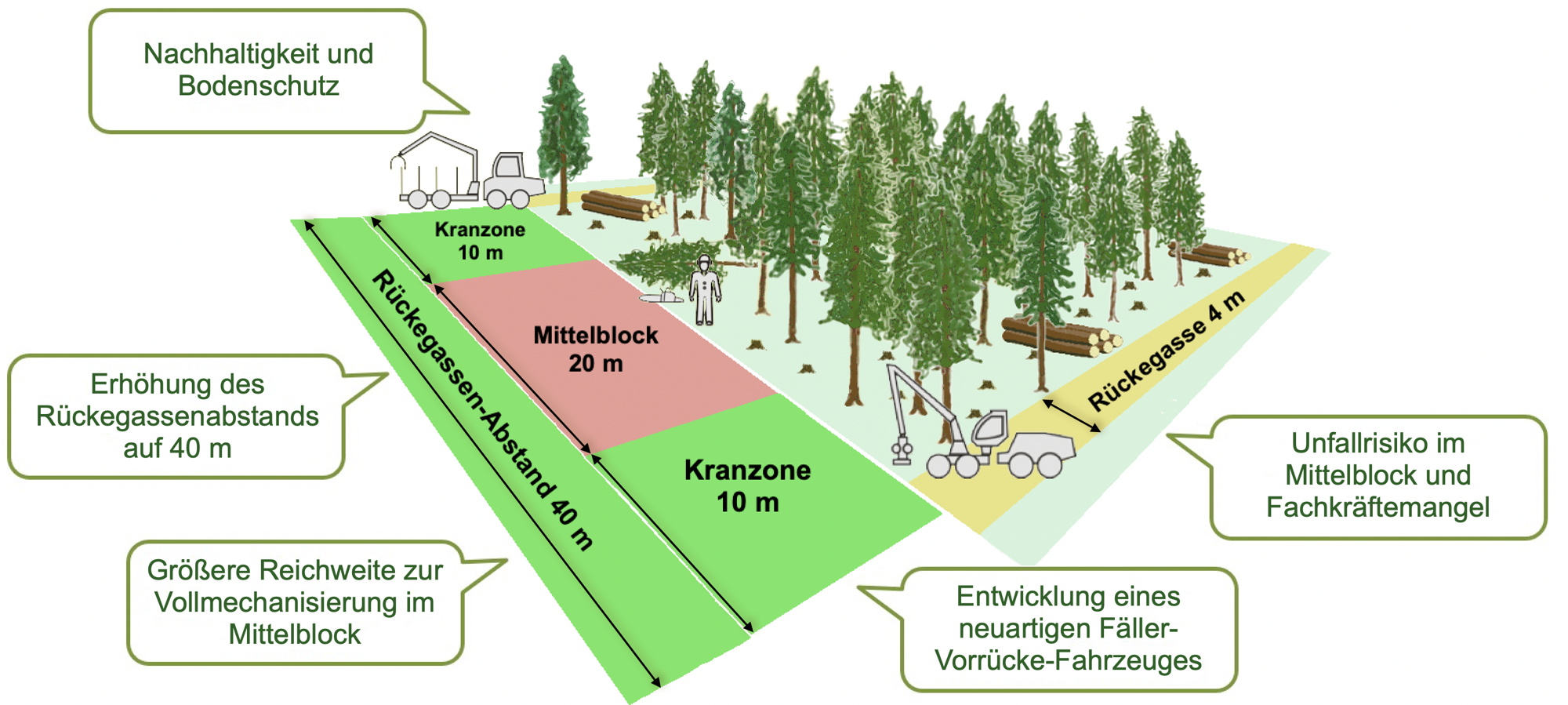
Verbundvorhaben zur Entwicklung, prototypischen Umsetzung und Bewertung eines neuen Maschinenkonzepts zur Mechanisierung...

Fusion von Maschinen- und Geodaten in Digitalen Zwillingen von Infrastrukturobjekten und deren...

Entwicklung einer neuartigen, digitalisierten Fertigungsstrategie für die automatisierte Produktion individualisierter FVK-Bauteile (IFVK)...
Eine Tuftingmaschine bestickt ein Trägermaterial durch das Zusammenspiel von Nadel, Greifer und...


Training und Validierung von KI-Algorithmen mittels massiv-paralleler Ausführung Digitaler Zwillinge
Entwicklung eines innovativen Waldentwicklungs- und Dienstleistungskonzepts zur Optimierung ...


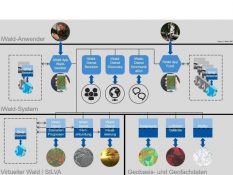
Charakteristisch für den Branchencluster Wald und Holz ist die Vielschichtigkeit und Heterogenität...

Die Entwicklung neuer Sensorhard- und -software im ViTOS-Testbed ist der erste Schritt...

Basierend auf dem didaktischen FeDiNAR-Konzept werden mittels Digitaler Zwillinge der Lernenden und...

Ziel von ClusterWIS ist die Etablierung eines nachhaltigen Rohstoffmanagements und einer effizienten...
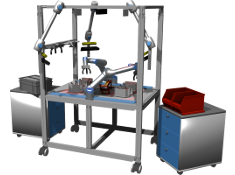

Im Projekt "ReconCell" wird eine neuartige Roboterzelle zur automatisierten Montage entwickelt, die...
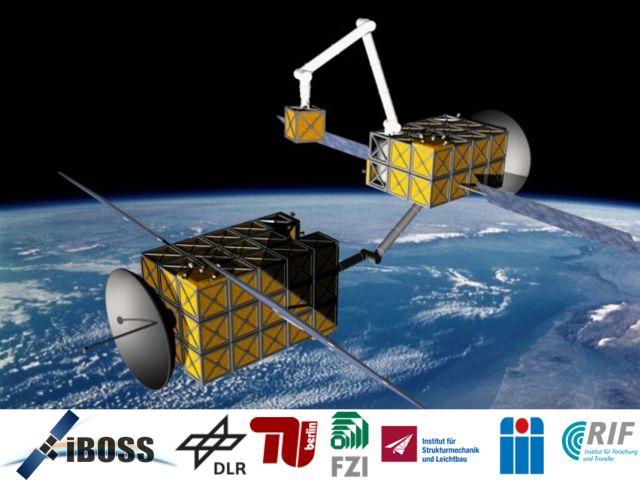

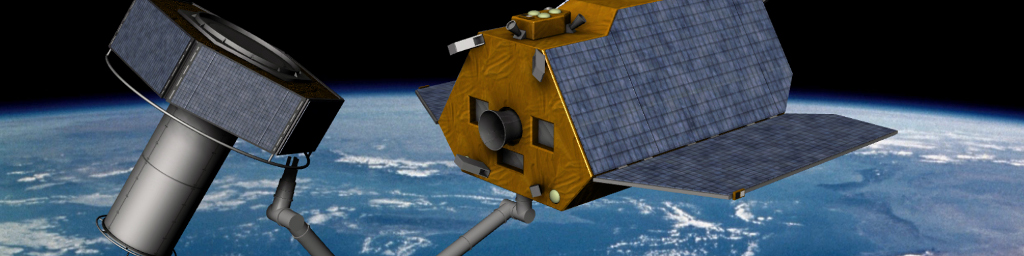
Heutige Satelliten sind meist monolithische Systeme ohne die Möglichkeit zur Wartung, Instandhaltung...

Im Rahmen des Projekts Virtual Crater wurde eine virtuellen Testumgebung entwickelt, die...
Das Projekt SCALAB (Scalable Automation for Emerging Lab Production) hat zum Ziel,...

Die Projektserie „ProPemo“ beschäftigt sich mit der Roboterprogrammierung „by Demonstration“, bzw. der...
Grundlage für die im Rahmen von INVIRTES (Integrierte Entwicklung komplexer Systeme mit...
Optische Sensoren sind unverzichtbar in nahezu allen Raumfahrtanwendungen. Im Rahmen robotischer...

Im Projekt SELOK wurde untersucht, wie die Landmarken von einem mobilen Roboter...
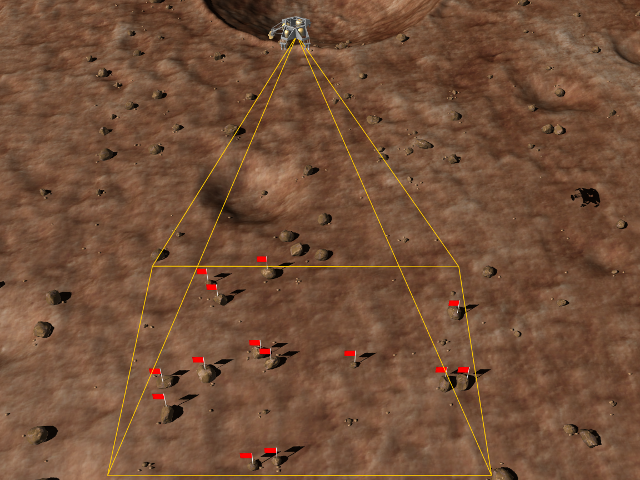

Eine wichtige Fragestellung bei der Exploration fremder Planeten durch in großen Teilen...
Ziel des DeLas-Projekts ist die deutliche Reduktion der Entwicklungszeit für die automatisierte...

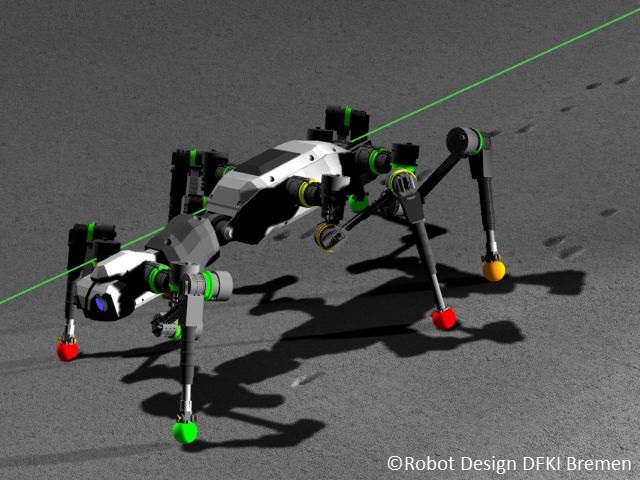
Katastrophen wie das Reaktorunglück von Fukushima zeigen deutlich, dass die Fähigkeiten aktueller...
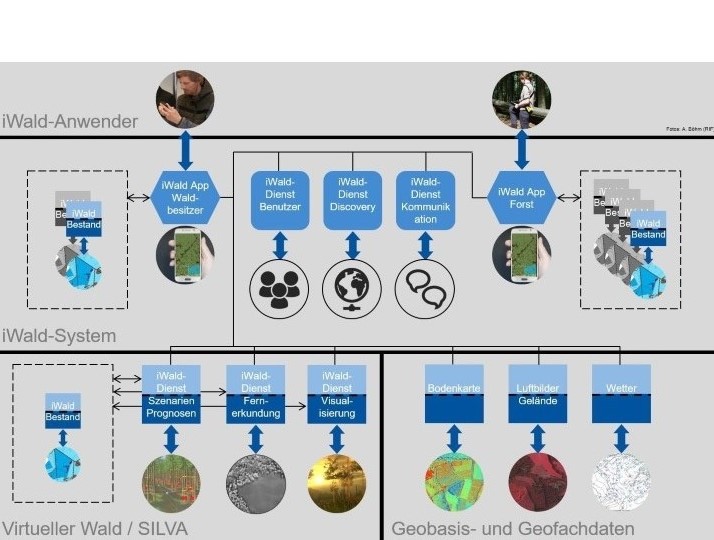
Mit dem Virtuellen Wald gehen in Nordrhein-Westfalen die sprichwörtlichen Zeiten, in denen...
Das Projekt "IntellAct" addressiert das Problem, Objektmanipulationen auf der Signal- und der...


{kind=link}
{kind=link}
{kind=link}