


FeDiNAR – Fehler Didaktisch Nutzbar Machen mit Augmented Reality
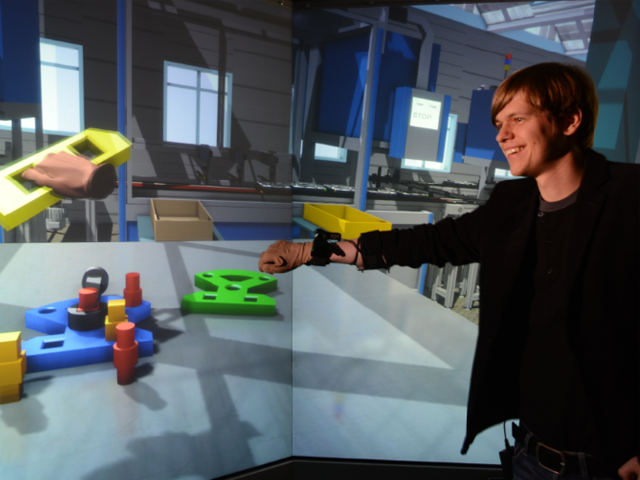
Im Rahmen dieses Projekts wird das FeDiNAR-System entwickelt, welches Fehler als äußerst fördernde Lerngelegenheit in den Mittelpunkt stellt und ein entsprechendes Lernen direkt an der realen Maschine ermöglicht. Basierend auf dem didaktischen FeDiNAR-Konzept werden mittels Digitaler Zwillinge der Lernenden und des realen Systems Handlungen erfasst, deren Konsequenzen simuliert und den Lernenden in AR visualisiert. Cloud- und Web-Services ermöglichen Lernenden und Lehrenden in der FeDiNAR-Community Lernereignisse und -szenarien zusammenzustellen und gemeinsam zu evaluieren.
Zurzeit fehlt es an didaktischen Konzepten für Lernende und Lehrende in der betrieblichen Aus- und Weiterbildung industrieller und handwerklicher elektro- und metalltechnischer Berufe, um Fehler in realen Arbeitssituationen lernwirksam zu nutzen. So ist es in den meisten Lehr- und Lernsituationen der beruflichen Bildung aktuell nicht möglich, dass Lernende Fehler machen, da hieraus negative Folgen hinsichtlich Sicherheit, Wirtschaftlichkeit oder Umweltschutz entstehen können, die von Lehrenden zu verantworten sind.
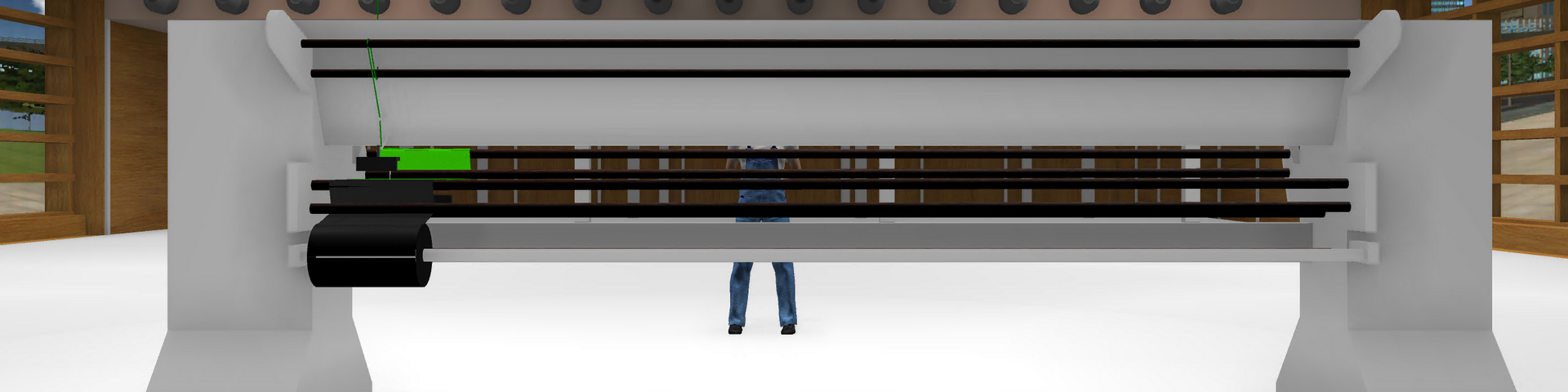
Das Ziel des Verbundprojektes FeDiNAR ist die Entwicklung und Evaluation eines AR-gestützten Lernsystems mit zugehörigen Lernszenarien, um von einem Lernenden „gemachte“ Fehler möglichst effizient für den individuellen Kompetenzerwerb zu nutzen. Mit dem FeDiNAR-System können Lernende mit konkreten Aufgaben in Lernszenarien konfrontiert werden, für die Entscheidungen zu treffen, Handlungen auszuführen und Ergebnisse zu bewerten sind. Lernende stehen hierbei an der realen Maschine und können mit dieser direkt interagieren. Ein Teil der Handlungen (und deren Auswirkungen) erfolgt allerdings ausschließlich in der virtuellen Welt, sodass z.B. ein auf der Fräsmaschine vergessener Schraubenschlüssel nur virtuell durch die Werkstatt fliegt und dies den Lernenden mittels AR visualisiert wird. Hierzu werden bereits auf dem Markt verfügbare Lösungen wie eine AR-Brille, eine Simulationsumgebung zur Modellierung, Aktualisierung und Simulation Digitaler Zwillinge von Mensch und Maschine sowie eine Softwarelösung zur Interaktionserfassung anwendungsorientiert zusammengeführt, um auch kleineren Betrieben und berufsbildenden Schulen den Einsatz dieses innovativen Lernsystems zu ermöglichen. Das Konsortium setzt sich aus der RWTH Aachen University mit Expertise in Didaktik und Mensch-Maschine-Interaktion, der Hochschule Ostwestfalen-Lippe als Anwendungsentwickler, der oculavis GmbH als Spezialist für Simulationstechnologie und der QualiTec GmbH als Aus- und Weiterbildungsdienstleister zusammen. Anwendungsbetriebe, Berufsschulen, Praxispartner für IT-Technologie, Lehrmittelhersteller und Sozialpartner helfen bei der anwendungsbezogenen Entwicklung und stellen eine Orientierung am Bedarf der Nutzenden sicher.
Weitere Projekte

Living Lab für Präzision und Robotisierung im Obstbau Obstbauern in der Maas-Rhein-Region...

Sicheres KI-Framework für verbesserte Wassereffizienz und Widerstandsfähigkeit


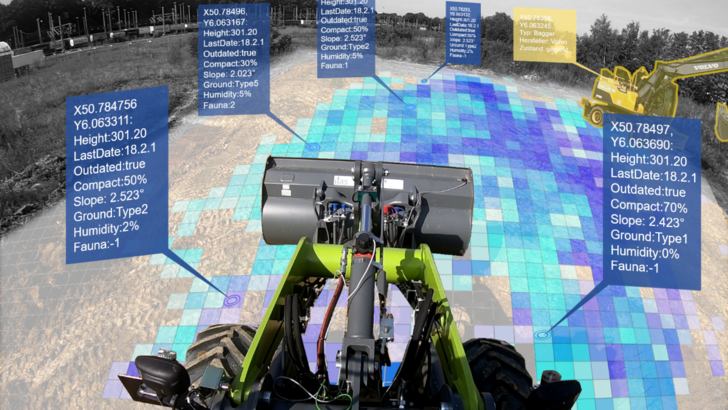
Der Waldboden ist einer der wichtigsten Produktionsfaktoren für die Forstwirtschaft. Er bildet...
Ziel des Vorhabens SmaSiKaFE („Smarte und sichere Kalamitätsflächenernte“) ist es, die Ernte...

Die Holzernte als Teil der multifunktionalen Waldwirtschaft bewegt sich immer mehr im...
Das Projekt S3I-X zielt darauf ab, zwei entgegengesetzte Anforderungen zu vereinen. Auf...

Ziel des Projekts DigiKomForst ist die Erstellung eines prototypischen Systems zum einfachen...
Ziel des Forschungsvorhabens CO2For-IT ist die Entwicklung, prototypische Umsetzung und praktische Erprobung...

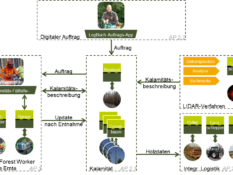
Weiterentwicklung und Adaption des BaSys-4-Systems zur Anwendung in der Forstwirtschaft Unternehmensübergreifende Verknüpfung...

In AsTeDiF wird ein Assistenzsystem zur Unterstützung des Maschinenbedieners in betrieblichen Trainings-...
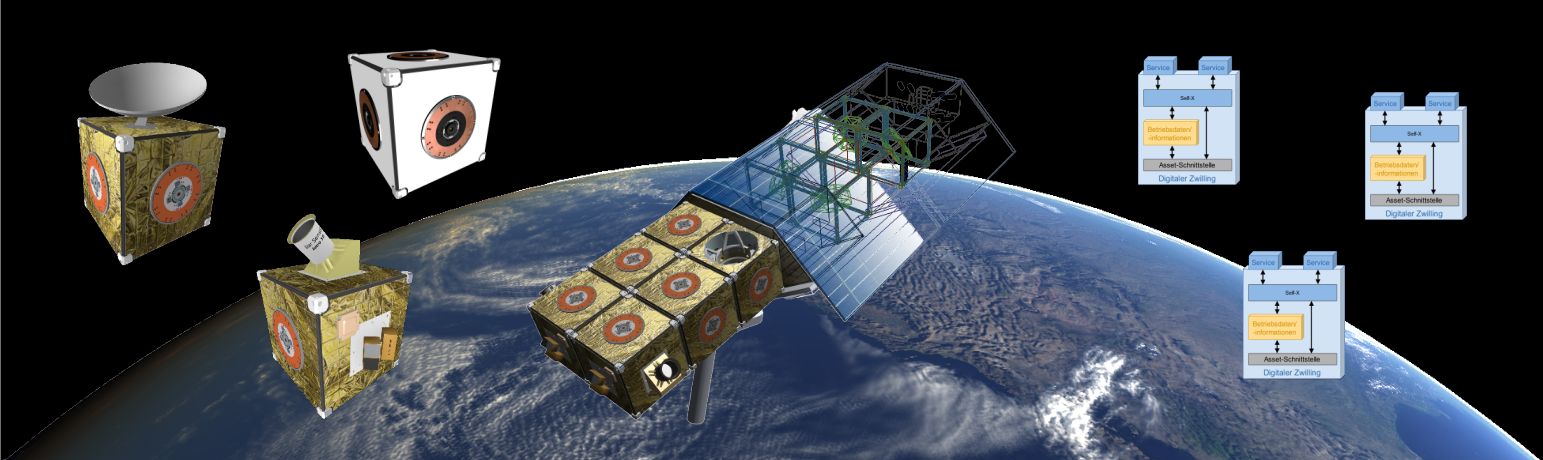
Das Twins4Space-Projekt entwickelt eine dezentrale Softwareplattform zur Orchestrierung von Digitalen Zwillingen und...
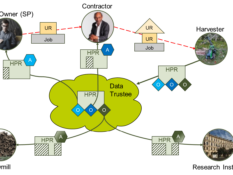
Ein Datentreuhandmodell für die Forstwirtschaft mit dem Ziel, vertrauensvolles, transparentes und sicheres...
Das Projekt „Climate Community for Wind“ (CC4Wind) untersucht die Akzeptanz von Windkraft....
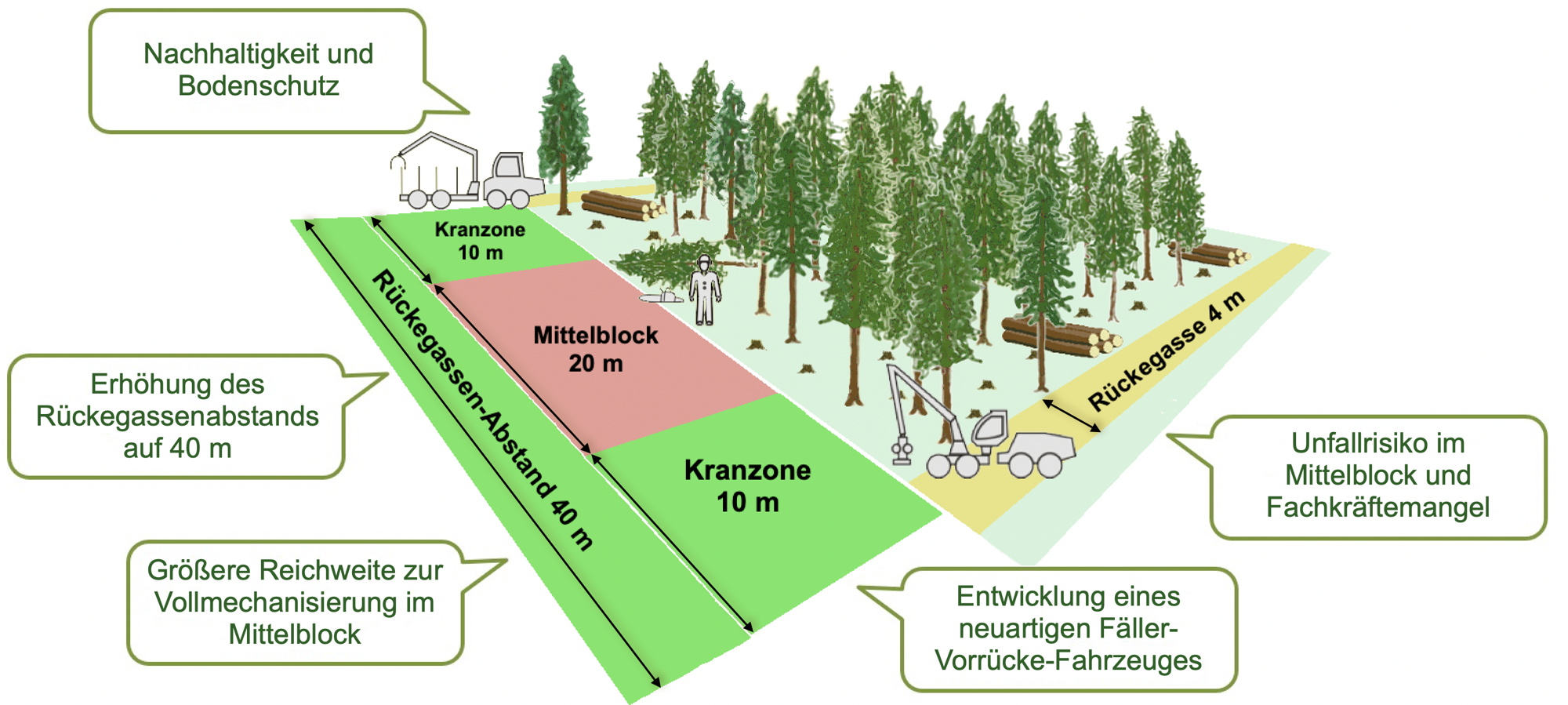
Verbundvorhaben zur Entwicklung, prototypischen Umsetzung und Bewertung eines neuen Maschinenkonzepts zur Mechanisierung...

Fusion von Maschinen- und Geodaten in Digitalen Zwillingen von Infrastrukturobjekten und deren...

Entwicklung einer neuartigen, digitalisierten Fertigungsstrategie für die automatisierte Produktion individualisierter FVK-Bauteile (IFVK)...
Eine Tuftingmaschine bestickt ein Trägermaterial durch das Zusammenspiel von Nadel, Greifer und...


Training und Validierung von KI-Algorithmen mittels massiv-paralleler Ausführung Digitaler Zwillinge
Entwicklung eines innovativen Waldentwicklungs- und Dienstleistungskonzepts zur Optimierung ...


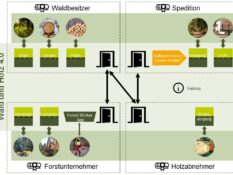
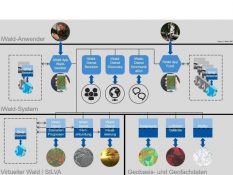
Charakteristisch für den Branchencluster Wald und Holz ist die Vielschichtigkeit und Heterogenität...

Die Entwicklung neuer Sensorhard- und -software im ViTOS-Testbed ist der erste Schritt...

Basierend auf dem didaktischen FeDiNAR-Konzept werden mittels Digitaler Zwillinge der Lernenden und...

Ziel von ClusterWIS ist die Etablierung eines nachhaltigen Rohstoffmanagements und einer effizienten...
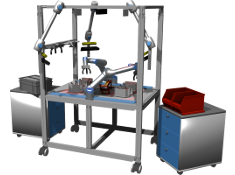

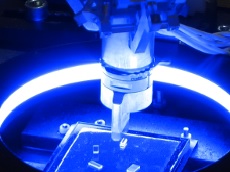
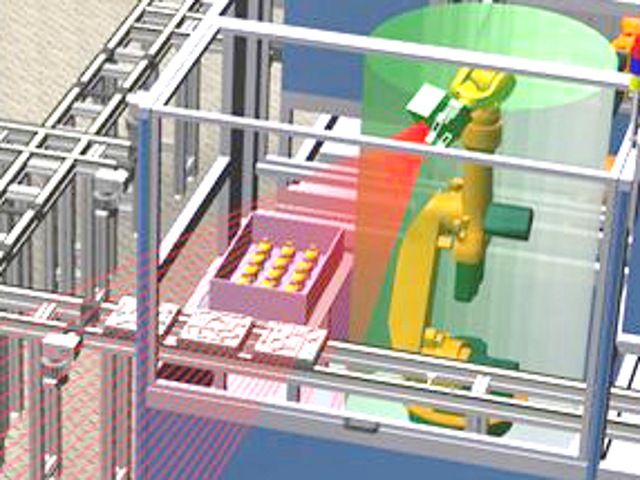
Im Projekt "ReconCell" wird eine neuartige Roboterzelle zur automatisierten Montage entwickelt, die...
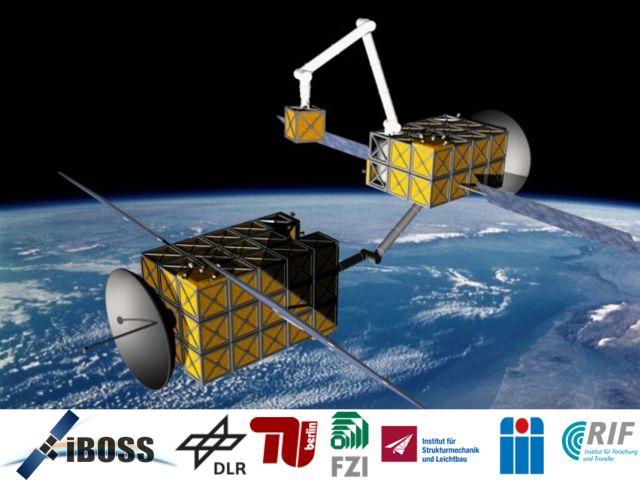

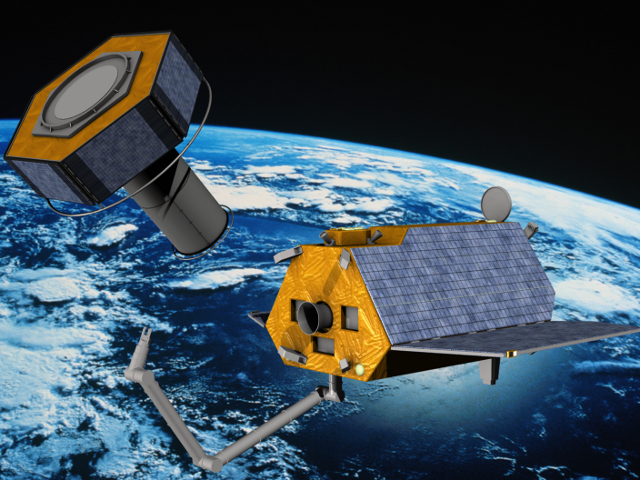
Heutige Satelliten sind meist monolithische Systeme ohne die Möglichkeit zur Wartung, Instandhaltung...

Im Rahmen des Projekts Virtual Crater wurde eine virtuellen Testumgebung entwickelt, die...
Das Projekt SCALAB (Scalable Automation for Emerging Lab Production) hat zum Ziel,...

Die Projektserie „ProPemo“ beschäftigt sich mit der Roboterprogrammierung „by Demonstration“, bzw. der...
Grundlage für die im Rahmen von INVIRTES (Integrierte Entwicklung komplexer Systeme mit...
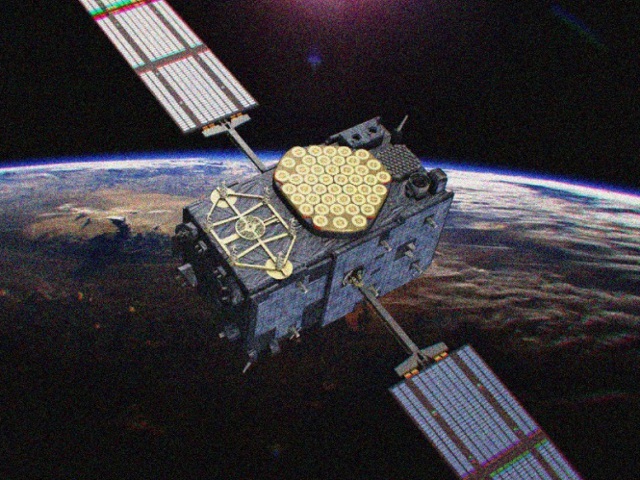
Optische Sensoren sind unverzichtbar in nahezu allen Raumfahrtanwendungen. Im Rahmen robotischer...

Im Projekt SELOK wurde untersucht, wie die Landmarken von einem mobilen Roboter...
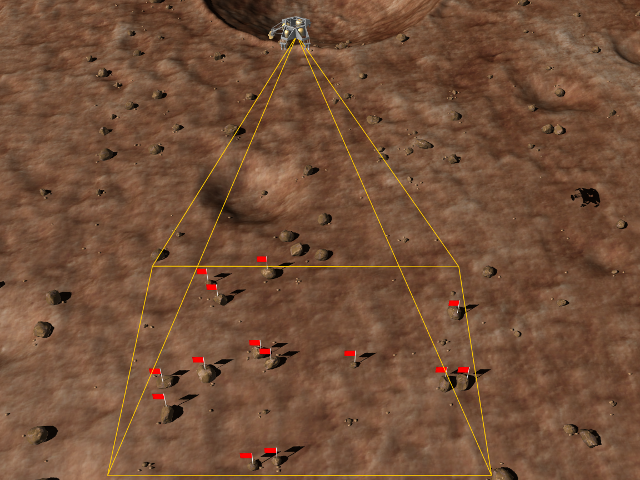

Eine wichtige Fragestellung bei der Exploration fremder Planeten durch in großen Teilen...
Ziel des DeLas-Projekts ist die deutliche Reduktion der Entwicklungszeit für die automatisierte...

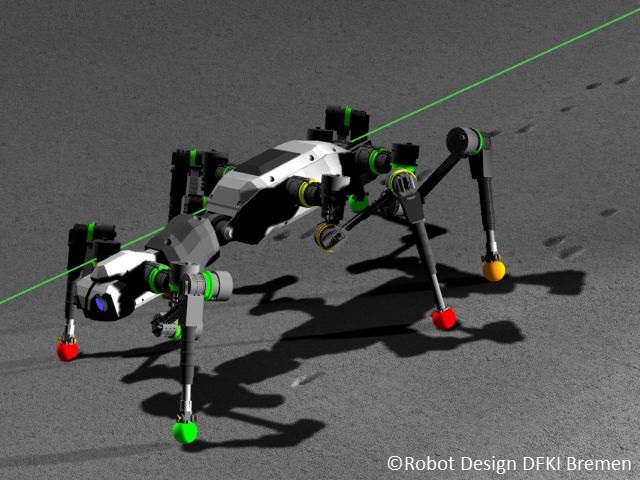
Katastrophen wie das Reaktorunglück von Fukushima zeigen deutlich, dass die Fähigkeiten aktueller...
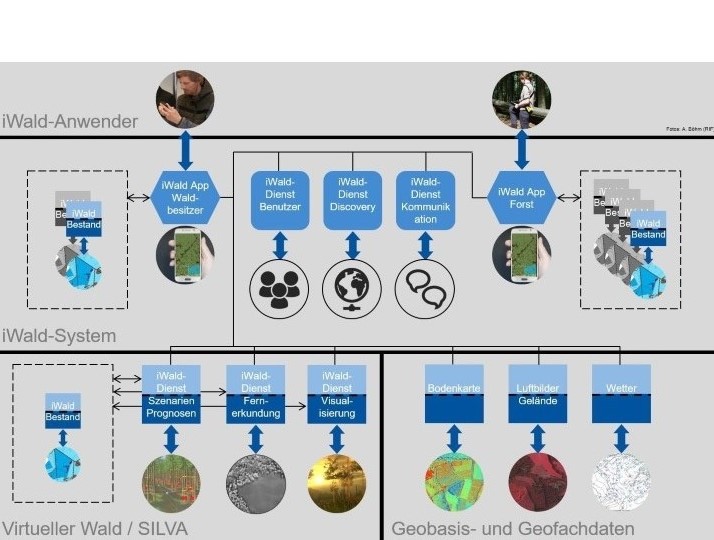
Mit dem Virtuellen Wald gehen in Nordrhein-Westfalen die sprichwörtlichen Zeiten, in denen...
Das Projekt "IntellAct" addressiert das Problem, Objektmanipulationen auf der Signal- und der...

