FeDiNAR – Utilizing Augmented Reality to make errors didactically usable
In the context of this project the FeDiNAR system is developed, which focuses on errors as an extremely stimulating learning opportunity enabling corresponding learning directly at the real machine. Based on the didactic FeDiNAR concept, Digital Twins of the learners and the real system are used to capture actions, simulate their consequences and visualize these to learners in AR. Cloud and web services enable learners and teachers in the FeDiNAR community to compile and jointly evaluate learning events and scenarios. At present, there is a lack of didactic concepts for learners and teachers in the vocational and further training of industrial and craft electrical and metalworking occupations in order to use errors in real work situations in a learning effective manner. For example, in most teaching and learning situations in vocational education and training it is currently not possible for learners to make mistakes, as this can have negative consequences in terms of safety, economic efficiency or environmental protection for which teachers are responsible.
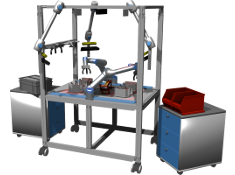
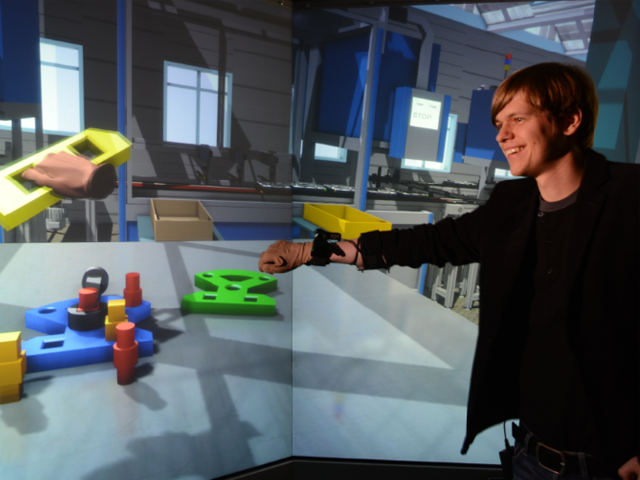
The aim of the FeDiNAR joint project is the development and evaluation of an AR-supported learning system with associated learning scenarios in order to use errors made by a learner as efficiently as possible for the individual acquisition of competence. With the FeDiNAR system learners can be confronted with concrete tasks in learning scenarios for which decisions have to be made, actions carried out and results being evaluated. Learners are in front of real machine and can interact directly with it. However, some of the actions (and their effects) take place exclusively in the virtual world, so that, for example, a wrench forgotten on the milling machine only flies virtually through the workshop and this is visualised to the learner via AR. To this end, solutions already available on the market, such as AR glasses, a simulation environment for modelling, updating and simulating Digital Twins of man and machine, and a software solution for recording interactions, will be brought together in an application-oriented manner in order to also enable smaller companies and vocational schools to use this innovative learning system. The consortium consists of the RWTH Aachen University with expertise in didactics and human-machine interaction, the Technische Hochschule Ostwestfalen-Lippe as application developer, the oculavis GmbH as specialist for simulation technology and the QualiTec GmbH as training and further education service provider. Application companies, vocational schools, practical partners for IT technology, manufacturers of teaching aids and social partners help with application-related development and ensure orientation to the needs of the users.
More Projects