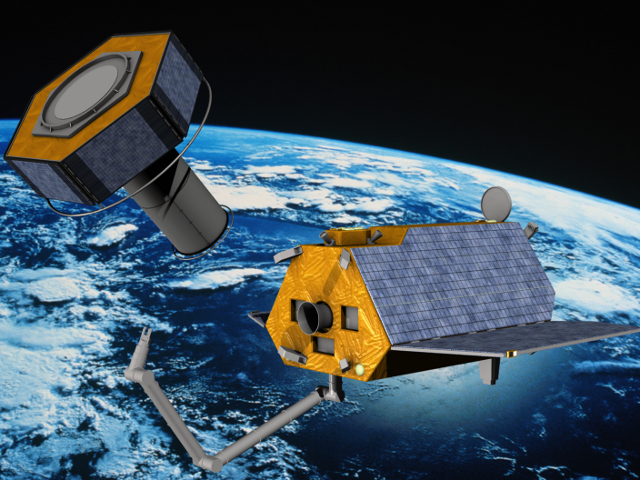
Today’s satellites are mostly monolithic systems without the option of maintenance, upkeep or reconfiguration. The service life of individual components or duration of an individual mission therefore determines the service life of the satellite in its entirety. At the end of its service life the satellite then becomes space debris, posing a threat to other satellites, to the International Space Station (ISS), or to populated areas on earth, if it falls from the space. For this reason project iBOSS (Intelligent Building Blocks Concept for On-Orbit Satellite Servicing) is examining a concept for modularly designed satellites which can then be reconfigured in orbit by service satellites, placed into other orbits or undergo a controlled fall. Therefore taking center stage in iBOSS-2, the current project phase is On-Orbit Servicing (OOS), in other words, the robotic manipulation and maintenance of satellites in orbit. The following image shows the concept of reconfiguring a modular satellite in orbit.
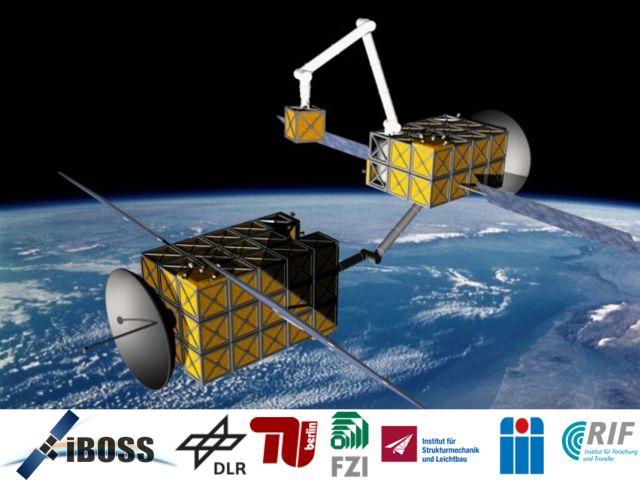
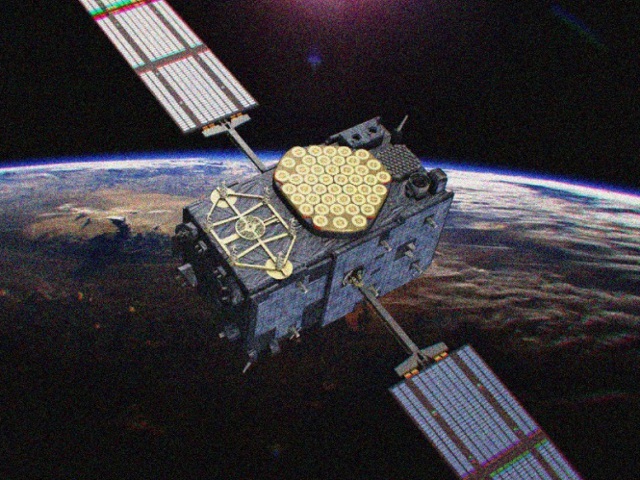
The modular satellite is constructed of individual cubes with an edge of 40 cm, which in each case contain different sub-components of the satellite and fulfil the corresponding sub-functions. Larger components can be incorporated using combinations of a number of cube units. The cubes are connected to one another via multi-function interfaces (mechanical coupling, energy supply, communication), which can be opened and closed during reconfiguration.
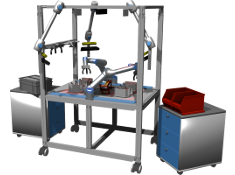
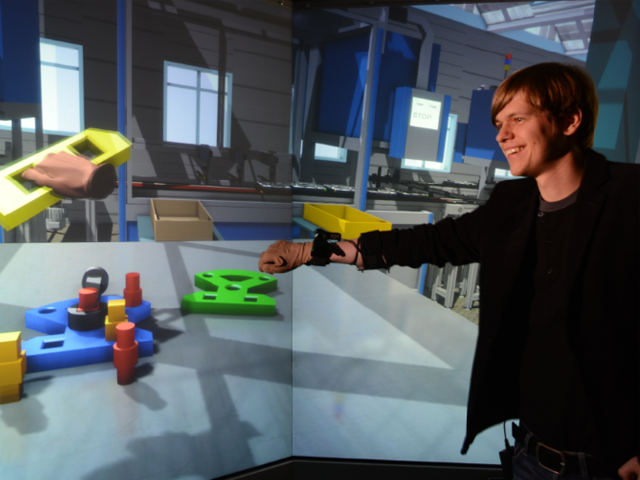
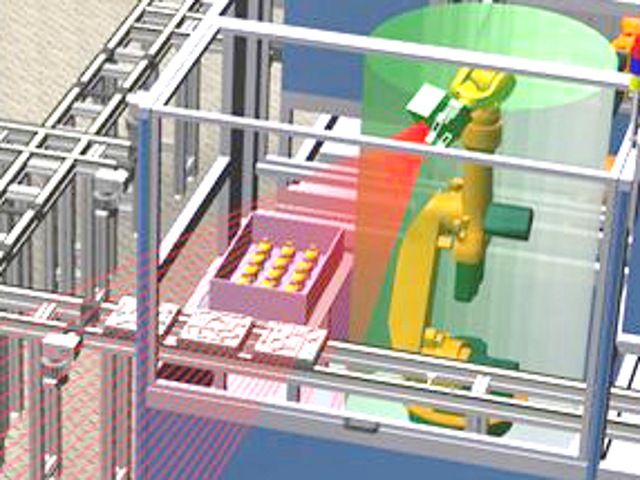
Together with RIF e.V., the Research Institute for Research and Transfer, MMI is developing the iBOSS virtual test bed, which pools the innovations of the individual project partners and makes available a shared development environment. Crucial here is that the opportunity is provided to test a plan for the reconfiguration of a satellite on a physical multi-body model. Further important aspects are the structural burden on connecting elements in the satellite group and temperature equalization in satellites, which is disparately more complex in the case of a modular system. A fundamental component of VTi is a dynamics based simulation model for position control and servicing. For this CAD models of the components were reconstructed into rigid body dynamics models. Additionally new configurations can be assembled from the components and be connected, thus making available a model library comprising separate individual components, building-block components and satellites.
Project partners:
- TUB – Institute for Air and Space Travel at the University of Berlin
- FZI – Centre for Information Technology at the Karlsruhe Institute for Technology
- SLA – University of Aachen’s Institute of Structural Mechanics and Lightweight Design
- MMI – University of Aachen’s Institute for Man and Machine Interaction
- RIFe.V. – Research Institute for Research and Transfer
- JKIC – Joerg Kreisel International Consultant
- DLR – GSOC – German Space Operations Center operated by the German Aerospace Center
Also go to:
https://www.raumfahrttechnik.tu-berlin.de/menue/forschung/aktuelle_projekte/iboss-2/
https://www.fzi.de/forschung/projekt-details/iboss/
More Projects











{kind=link}
{kind=link}
{kind=link}
{kind=link}