Posted by https://www.mmi.rwth-aachen.de/en/author/joernthieling/& filed under .
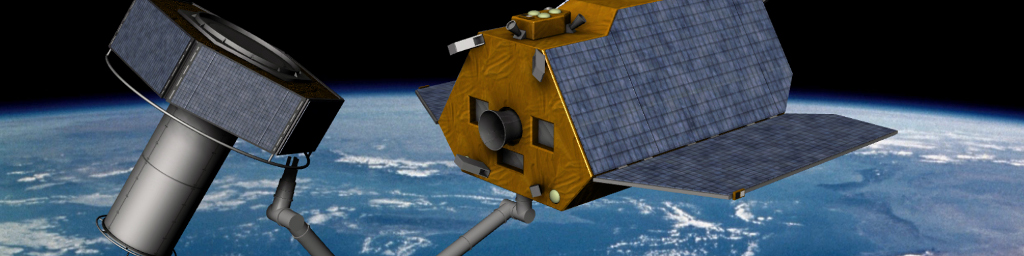
The “Mars Sample Return (MSR)” mission planned by NASA and ESA is probably one of the most prominent missions in international space exploration. The aim of this mission is to automatically capture soil samples collected on Mars as part of the “Earth Return Orbiter (ERO)” sub-mission and bring them back to Earth.
Posted by https://www.mmi.rwth-aachen.de/en/author/janreitz/& filed under .
The Twins4Space project develops a decentralized software platform for orchestrating Digital Twins and Services, enabling highly fault-tolerant and reconfigurable space… Read more »
Posted by https://www.mmi.rwth-aachen.de/en/author/joernthieling/& filed under .
Die Entwicklung neuer Sensorhard- und -software im ViTOS-Testbed ist der erste Schritt im Lebenszyklus optischer Sensoren. Anschließend werden die einzelnen Hardwarekomponenten gefertigt, getestet und in das umgebende System integriert. Genau hier setzt ViTOS-II an.
Posted by https://www.mmi.rwth-aachen.de/en/author/richard-muschiol/& filed under .
The basis for the techniques, components and processes that are to be developed within the framework of INVIRTES (integrated development of complex systems with virtual test beds as the basis of key world models and cutting edge eRobotics concepts) is the further development of cutting edge processes used by eRobotics and in this connection, specifically virtual test beds.
Posted by https://www.mmi.rwth-aachen.de/en/author/richard-muschiol/& filed under .
Optical sensors are indispensable in almost all space flight applications. Within the framework of robotic space missions they take on special significance. In this field high-resolution camera images or distance measurements via laser scanners form the basis both for the control of such systems by operators in the tele-operation service from the ground and for (partly) autonomous operation in space.
Posted by https://www.mmi.rwth-aachen.de/en/author/richard-muschiol/& filed under .
SELOK investigates how landmarks from a mobile robot dependent on the robot position among others can be captured with newly developed laser scanners from different perspectives and summarized into a local area map.
Posted by https://www.mmi.rwth-aachen.de/en/author/richard-muschiol/& filed under .
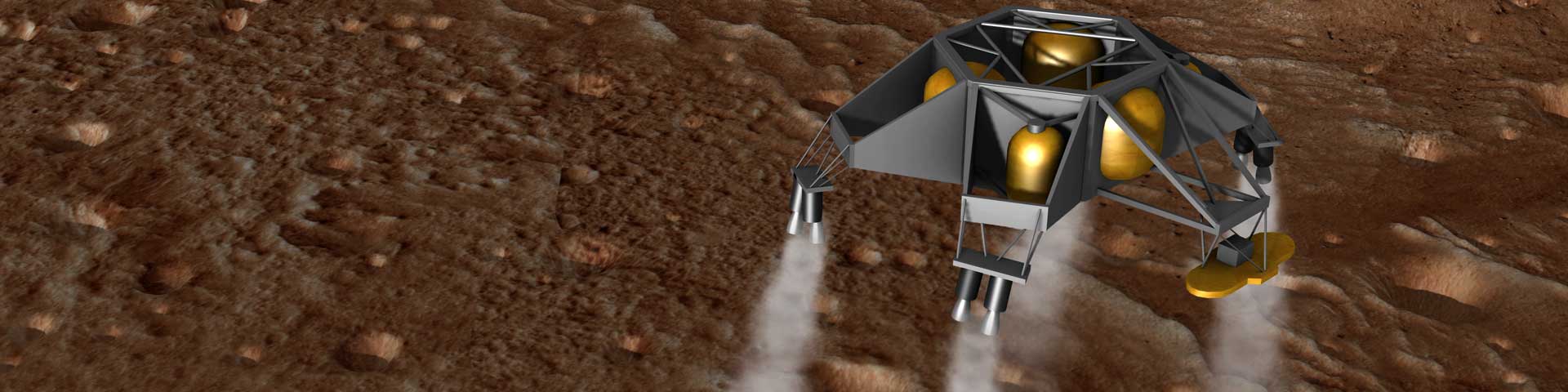
Within the framework of the Virtual Crater project, a test environment was developed which makes it possible to program, test and optimize robotic systems cost effectively in a realistic simulated, lunar crater landscape.





{kind=link}
{kind=link}
{kind=link}