The development of new sensor hard- and software components within the ViTOS-Testbed is the first step in the life cycle of optical sensors. Subsequently, the individual hardware components are manufactured, tested and integrated into the surrounding system. This is precisely where ViTOS-II comes into play.
In ViTOS-II, processes are researched and the necessary components are developed, which provide a seamless transition from the simulated prototype to the real system in a real environment. Following the ideas of virtual commissioning and gradual substitution from the industrial manufacturing sector, ViTOS-II enables the successive replacement of individual simulated elements by corresponding emulated or real components and thus a continuous transition from the simulated to the real system.

For this purpose, components of Experimental Digital Twins (EDT) of real sensor data processing systems are developed whose structures allow a 1-to-1 representation of the closed loop. Through the use of natural – as used and often standardized in reality – interfaces, switches between simulation and reality are provided at any point of the data processing chain realizing the novel approach of Hybrid Twins.
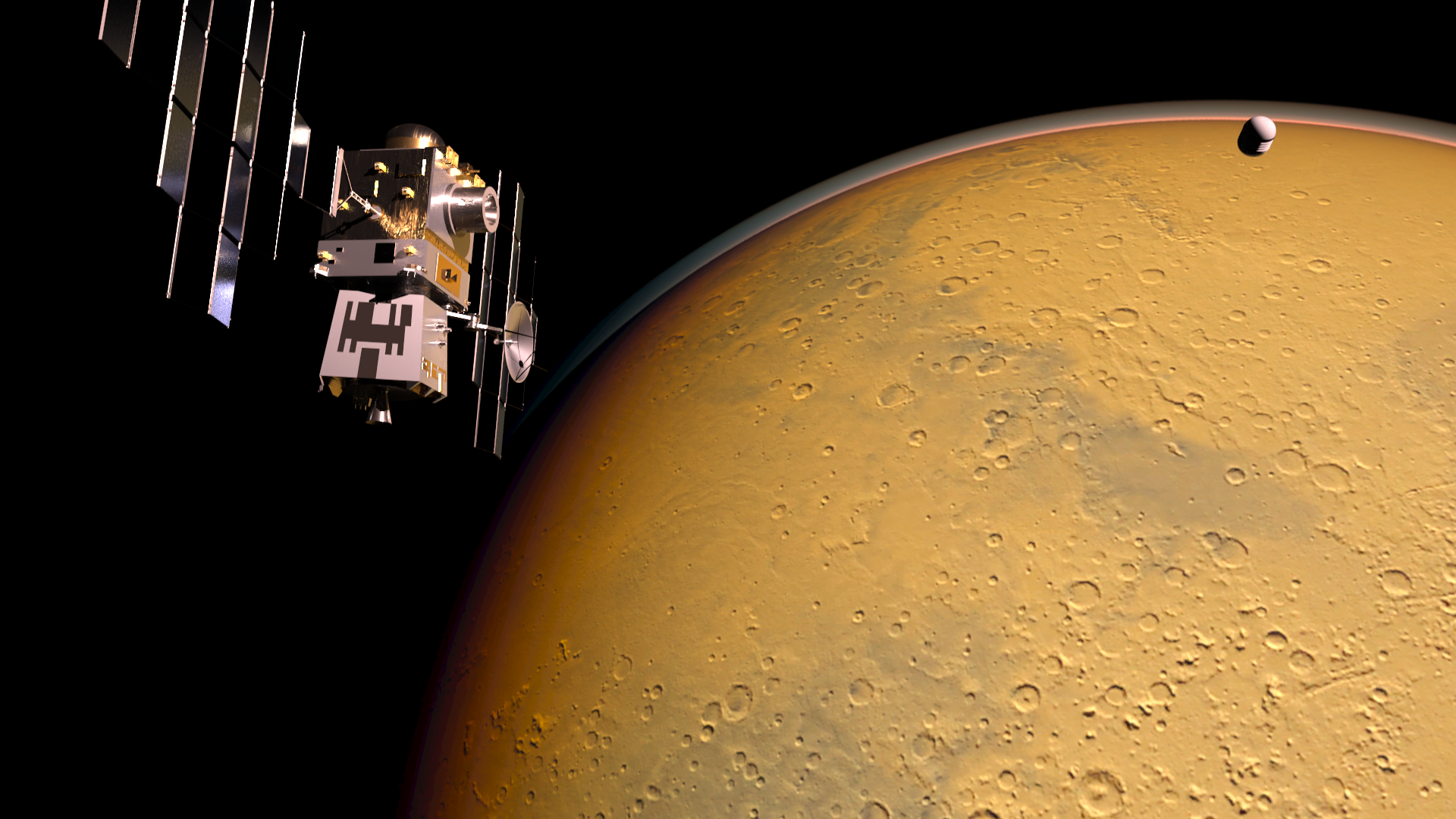
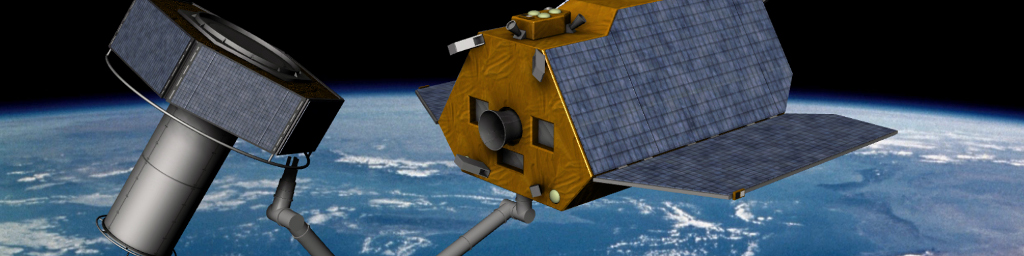
Here, the ViTOS-Testbed and the associated processes shall be seamlessly integrated in the development processes of the participating industrial players from the Space and Automotive sectors. Afterwards, the validation of the research results shall be validated under using the pre-defined reference scenarios “LiDAR-Based Rendezvous & Docking” and “Intelligent Camera Monitor System”. With the objective of developing generic models and processes that provide a physically-based simulation of the sensor types LiDAR and camera as well as a bidirectional technology transfer between Space and Automotive. ViTOS-II picks up on this complexity and researches solutions to overcome it.
Weitere Projekte

Living Lab for Precision and Robotisation in Fruit Growing Fruit growers across the Meuse-Rhine...


In AsTeDiF, an assistance system is being developed to support the machine...
The Twins4Space project develops a decentralized software platform for orchestrating Digital Twins...
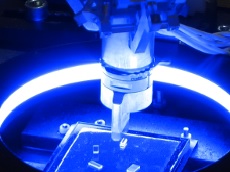
A tufting machine embroiders a backing material through the interaction of needle,...


Die Entwicklung neuer Sensorhard- und -software im ViTOS-Testbed ist der erste Schritt...

The objective of the DeLas project is the significant reduction of process...
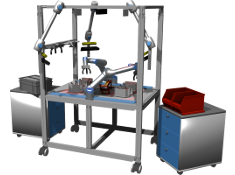

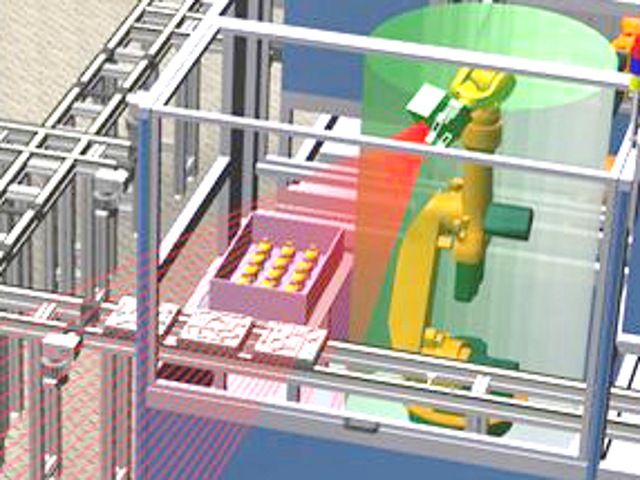
"ReconCell" develops a new type of robot workcell, its required process infrastructures...
The forest information and management system "Virtual Forest" finally takes the long...
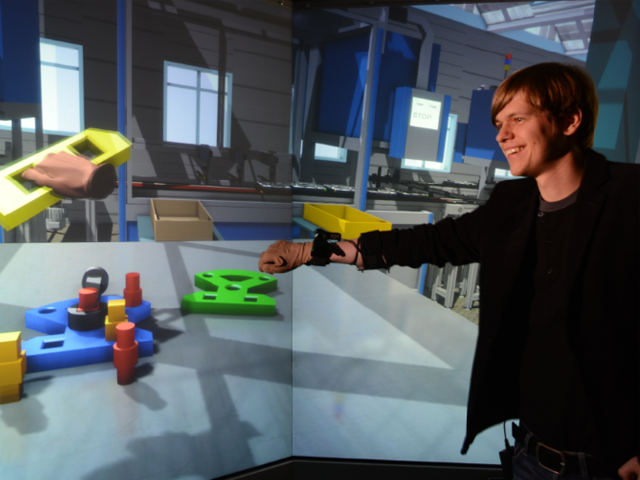
The “IntellAct” project is developing a system that can learn through observing...
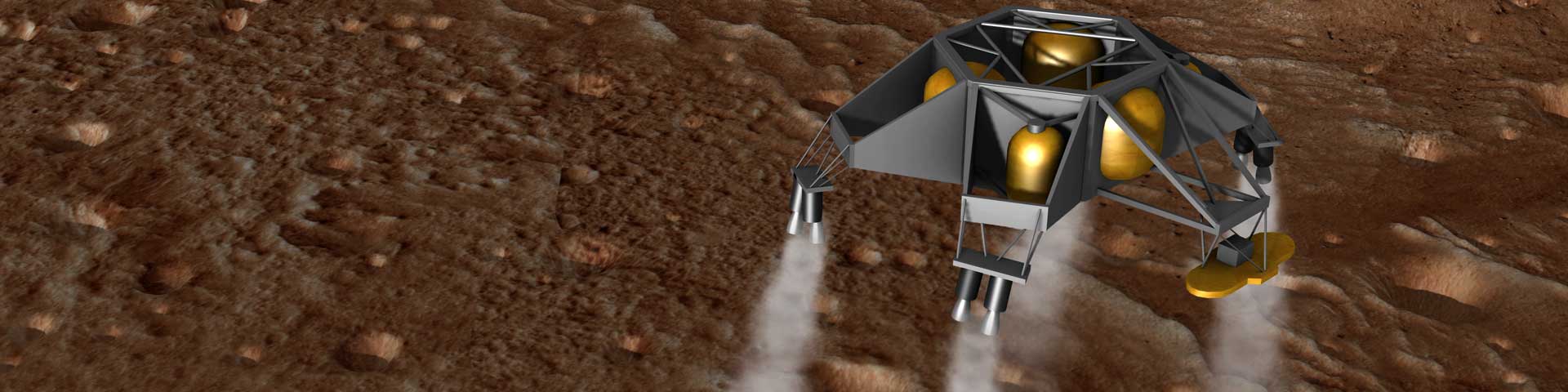
Optical sensors are indispensable in almost all space flight applications. Within the...


The ProDemo project series deals with robot programming by demonstration and with...
The Scalable Automation for Emerging Lab Production project (SCALAB) has as its...

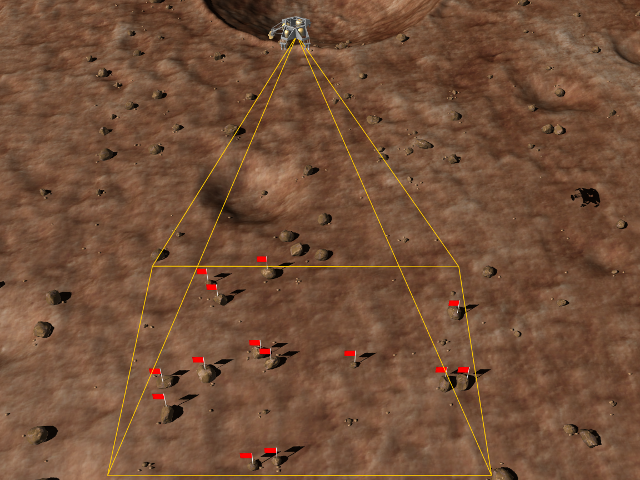
Within the framework of the Virtual Crater project, a test environment was...
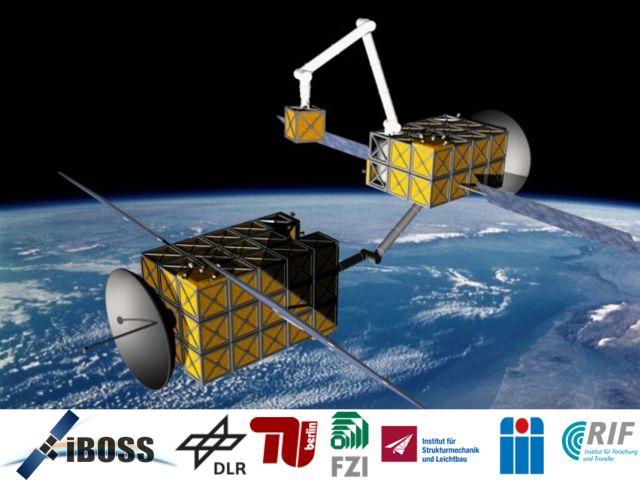

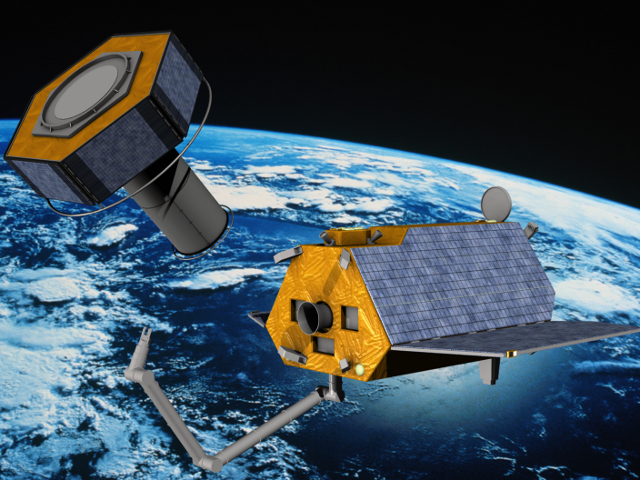
Today’s satellites are mostly monolithic systems without the option of maintenance, upkeep...


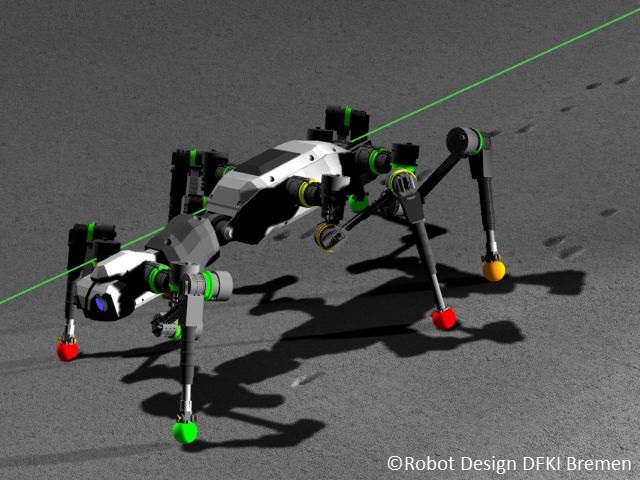
Katastrophen wie das Reaktorunglück von Fukushima zeigen deutlich, dass die Fähigkeiten aktueller...


{kind=link}
{kind=link}
{kind=link}