eRobotics
How can I develop complex systems efficiently? How can interdisciplinary innovation teams work together effectively? How can I explain the workings of my machine to customers, operating personnel and maintenance staff? How can I ensure that an exploration robot will work in space, without having been in a position to test it in practise beforehand? How can I put intelligent systems into effect that know themselves and can perceive their surroundings, then make decisions using this as a basis? The development of concepts aimed at answering questions like this is the focal point of the work done by RWTH Aachen University’s Institute for Man and Machine Interaction (MMI). What we do in this regard is combine state-of-the-art 3D simulation technology methods and innovative concepts from robotics, with electronic media. In the process, what we have come up with is a novel approach to eRobotics.
Making provision for entire virtual test environments in connection with this, are virtual test beds. Here newly developed systems must demonstrate their performance capability in their operational environment under arbitrary boundary conditions. The virtual test beds form the basis both in the first concept studies, as well as for comprehensive tests and the goal-orientated optimisation of individual components or overall systems. When integrated into real systems, virtual test beds enable the implementation of intelligent sensors, actuators or robots. Semantically aware environmental modelling methods bring the world into the computer for this purpose. MMI makes available innovative concepts for diverse areas of application processes in the context of eRobotics with simulation-based engineering and embodied simulation.
This is only a small selection of the work that MMI does. You too can discover the world of eRobotics with its manifold applications!
When it comes to simulation algorithms, the simulation of the dynamic behavior of the mechanical...

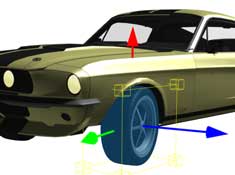
The development of increasingly sophisticated Advanced Driver Assistance Systems (ADAS) and highly complex Autonomous Vehicles...

Virtual test beds provide the foundations for the realization of new crystallization points for the...

Intelligent man and machine interfaces represent the key technologies for applications in service robotics, in...

The objective of innovations in eRobotics is to provide a comprehensive software environment for the...
Models are the basis of every simulation and therefore the basis of almost every eRobotic...

Almost all eRobotics techniques are based on the implementation of 3D simulation technology. The basis...

3D simulation of forestry machines facilitates training that is efficient and free from danger, e.g....

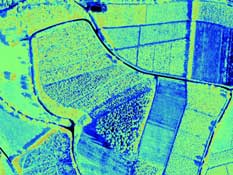
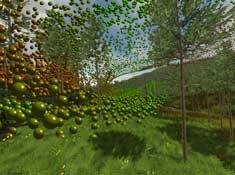
With the Virtual Forest, the era of the proverbial “you can’t see the wood for...

When it comes to the construction machine simulator, the realistic simulations of the machines themselves,...

Life without satellites has become inconceivable in this day and age. Whether it is used...
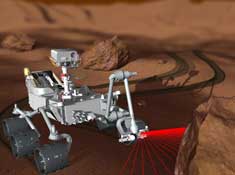
Robots are indispensable to planetary exploration and in the exploration of our solar system.

With its virtual International Space Station, MMI has developed a comprehensive, accessible and interactive...
“Simulation-based control” techniques in the context of 3D simulation technology enable the design and testing...

In the case of virtual reality applications the (audio)-visual feedback of the simulation takes often...
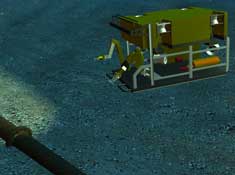
The development and operation of autonomous underwater vehicles (AUV) is a complex, dangerous and expensive...
In 2007 storm Kyrill unleashed its wrath on Europe. In the German state of North...

In the case of the combine harvester simulation, aside from realistic simulation of the machines,...
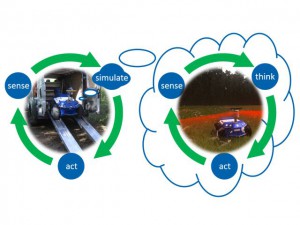
The so-called Sense-Think-Act paradigm is considered as the operative definition of a (mobile) robot. A...

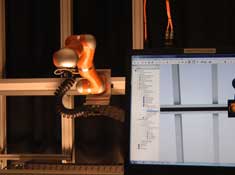
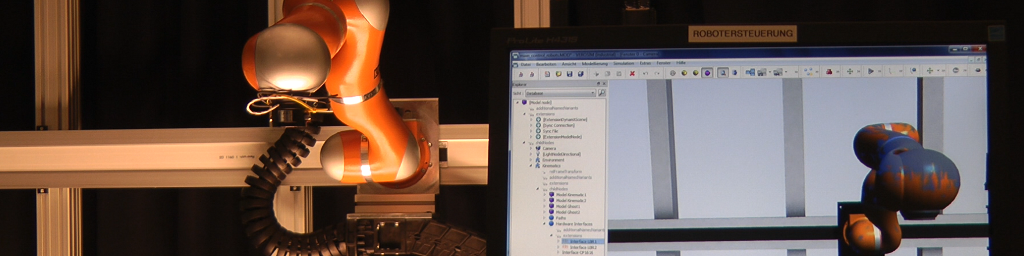
"Virtual Commissioning" aims at the setup and initial programming of complex automation systems based on...


{kind=link}
{kind=link}
{kind=link}
{kind=link}