Der Fellow Student Enlightenment Award 2017 wurde an Herrn Firas Khader für seine Matlab-Module zur Veranschaulichung von Aspekten der Roboterkinematik, Herrn Paul Kruse für seine Software zur Lösung und Visualisierung von KV-Diagrammen und Herrn Joel Schulz-Andres für seine Javascript-Implementierung des WDR-Papiercomputers verliehen.
Sami Hadaddin mit Zukunftspreis des Bundespräsidenten ausgezeichnet
Das MMI ist stolz und freut sich mit Prof. Dr. Sami Haddadin, der am 29.11.2017 mit dem Deutschen Zukunftspreis 2017, dem Preis des Bundespräsidenten für Innovation und Technik, ausgezeichnet wurde. Sami Hadaddin hat 2011 am MMI promoviert.
SGEM-Award 2017
Auf der SGEM Vienna Green 2017 wurde Dr.-Ing. Arno Bücken für den besten Vortrag seiner Kategorie mit dem SGEM Award 2017 ausgezeichnet. Die Veröffentlichung „Remote Sensing based Forest Management in Conjunction with a Succession Simulation“, die in Zusammenarbeit mit dem gaiac (Aninstitut der RWTH für Ökosystemanalyse und Bewertung) erstellt wurde, beschreibt Ansätze wie basierend auf öffentlich frei verfügbaren Fernerkundungsdaten ein detailliertes Waldmodell erstellt werden kann, das anschließend für diverse Funktionen nutzbar ist. Insbesondere kann das erzeugte Modell auch für externe Simulationen wie die Sukzessionssimulation ForS, die am gaiac entwickelt wurde, genutzt werden.
Neues Video: Immersive Simulation von Fahrdynamik
Die Simulationsplattform VEROSIM bietet die Möglichkeit zur realistischen 3D-Simulation von Fahrzeugen samt Fahrdynamik. Neben einer Steuerung am PC-Bildschirm können die Fahrzeuge, für eine vollständig immersive Erfahrung, auch im Motion-Simulator des MMI simuliert werden. Dieser vermittelt ein realistisches Beschleunigungsempfinden in Kombination mit einem sphärischen Bildschirm, der das gesamte Sichtfeld des Fahrgastes ausfüllt
Neues Video: Kamerasimulation für Automotive-Anwendungen
Simulierte Kameradaten können im Automotive-Kontext zur Erzeugung von Videosequenzen in konkreten Verkehrsszenarien genutzt werden. Die Möglichkeit zur Simulation eines Szenarios unter verschiedensten Umweltbedingungen erlaubt eine systematische Erzeugung von Videosequenzen zur Absicherung von Assistenzsystemen in der Fahrzeugentwicklung.
Neues Video: Sensorsimulation zur FAS/ADAS-Absicherung
Fahrerassistenzsysteme (FAS) bzw. Advanced Driver Assistance Systems (ADAS) werden aktuell mit Hilfe von Sensor-Aufnahmen aus Testfahrten von vielen Millionen Kilometern getestet und verifiziert. Mit Hilfe von Simulation (3D, Sensorik, Fahrdynamik, etc.) können Testsequenzen erstmalig systematisch erzeugt werden. Die Simulation von Szenarien ist dabei kostengünstig, reproduzierbar und liefert zugleich die notwendigen Ground-Truth-Daten zur Absicherung von FAS/ADAS-Systemen.
Ansys-Anbindung für Verosim
FEM-Struktursimulationen der kommerziellen Software Ansys sind an Verosim angebunden. Für die Simulation eines mechatronischen Systems kommt so eine weitere elementare Komponente hinzu, die im Rahmen eines ganzheitlichen Frameworks berücksichtigt werden kann. Komplexe Designentscheidungen, Optimierungen oder Handlungsanweisungen können so noch fundierter getroffen werden.
Neues Video: Vollautomatische Aktualisierung von BIM-Modellen
BIM(Building Information Modeling)-Modelle sind in der Industrie weit verbreitet und werden sowohl bei der Planung des Fabrikbaus als auch zur Planung des täglichen Betriebsablaufs herangezogen. Um diese Modelle möglichst aktuell zu halten und sowohl zeitlich als auch räumlich eine hohe Auflösung zu erzielen, bietet sich der Einsatz von autonomen Robotern an. Der Roboter ist hierbei mit einem Echtzeit-Laserscanner zur Kollisionsvermeidung und einem hochpräzisen Laserscanner zur Vermessung ausgestattet. Er bewegt sich mithilfe einer simulationsbasierten Steuerung autonom auf geeigneten Pfaden. An definierten Stationen werden hochpräzise 3D-Laserscans durchgeführt. Mithilfe der Wheel-Odometry Daten des Roboters findet eine Vorregistrierung der Laserscans in der virtuellen Umgebung statt. Die sich daraus ergebenden Punktwolken durchlaufen im Anschluss weitere Schritte der automatischen Datenverarbeitung: Nach einer feinen Registrierung der Daten werden zur Beschleunigung die zu verarbeitende Punktmenge skaliert sowie Ausreißer entfernt. Anschließend werden mittels Triangulation hochpräzise Geometrien generiert und das BIM-Modell aktualisiert. Dieses steht nun mit den aktuellsten Informationen für weitere Planungsaufgaben zur Verfügung.
Das verwendete BIM-Modell wurde freundlicherweise von der formitas GmbH (http://www.formitas.de) zur Verfügung gestellt.
Besonderer Dank für die Drehgenehmigung gilt der Demofabrik Aachen (http://demofabrik-aachen.rwth-campus.com).
Neue Vorlesung “Industrie 4.0 für Ingenieure”
Das Institut für Mensch-Maschine-Interaktion (MMI) bietet im Sommersemester 2017 die Vorlesung „Industrie 4.0 für Ingenieure“ als Blockzusatzveranstaltung für Studenten der Fakultät für Elektrotechnik und Informationstechnik an. Diese Vorlesung wird von renommierten Mitgliedern der Wissenschaftlichen Gesellschaft für Montage, Handhabung und Industrierobotik (MHI, www.wgmhi.de) gehalten, die ausgehend von ihren jeweiligen Fachgebieten in den Themenkomplex „Industrie 4.0“ einführen. Für weitere Informationen siehe hier.
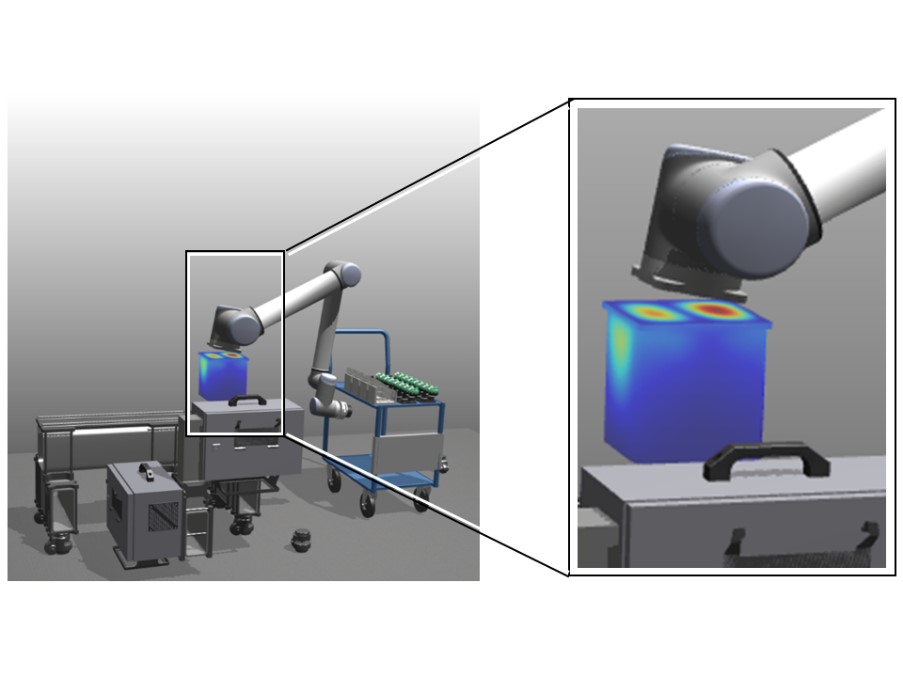
Neues Video: Simulationsbasierte Zustandsüberwachung realer Roboter in VEROSIM
Der Fokus dieses Videos liegt auf der Prädiktion der Energieeffizienz realer Roboter durch 3D Simulation in VEROSIM. Die Prädiktion erfolgt durch aktiv, d.h. anhand des Leistungsflusses wird entschieden, ob die aktuell benötigte Leistung zum „Beschleunigen“ oder zum „Abbremsen“ der jeweiligen Gelenke verwendet wird. Das Video illustriert, dass der Energieverbrauchs und die Energierückgewinnung realer Roboter anhand physik-basierter 3D-Simulation realistisch berechnet werden können. Dafür bieten Methoden der eRobotik eine integrative virtuelle Umgebung, um energetische Einsparpotentiale von Robotern in realen Anwendungen zu detektieren, zu quantifizieren und zu optimieren.


{kind=link}
{kind=link}
{kind=link}