Posted by https://www.mmi.rwth-aachen.de/author/joernthieling/& filed under .
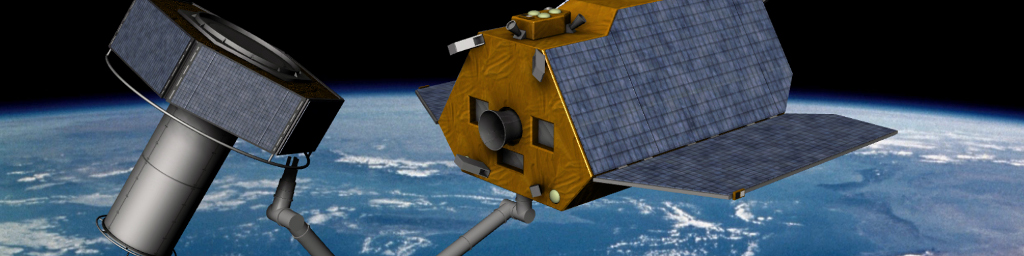
Die von NASA und ESA geplante Mission „Mars Sample Return (MSR)“ ist wohl eine der prominentesten Missionen in der internationalen Weltraumexploration. Als Ziel dieser sollen auf dem Mars gesammelte Bodenproben im Rahmen der Teilmission „Earth Return Orbiter (ERO)“ automatisch eingefangen und zur Erde gebracht werden.
Posted by https://www.mmi.rwth-aachen.de/author/janreitz/& filed under .
Das Twins4Space-Projekt entwickelt eine dezentrale Softwareplattform zur Orchestrierung von Digitalen Zwillingen und Diensten, die hochgradig fehlertolerante und rekonfigurierbare Raumfahrtsysteme ermöglicht…. Weiter »
Posted by https://www.mmi.rwth-aachen.de/author/joernthieling/& filed under .
Die Entwicklung neuer Sensorhard- und -software im ViTOS-Testbed ist der erste Schritt im Lebenszyklus optischer Sensoren. Anschließend werden die einzelnen Hardwarekomponenten gefertigt, getestet und in das umgebende System integriert. Genau hier setzt ViTOS-II an.
Posted by https://www.mmi.rwth-aachen.de/author/malte-rast/& filed under .
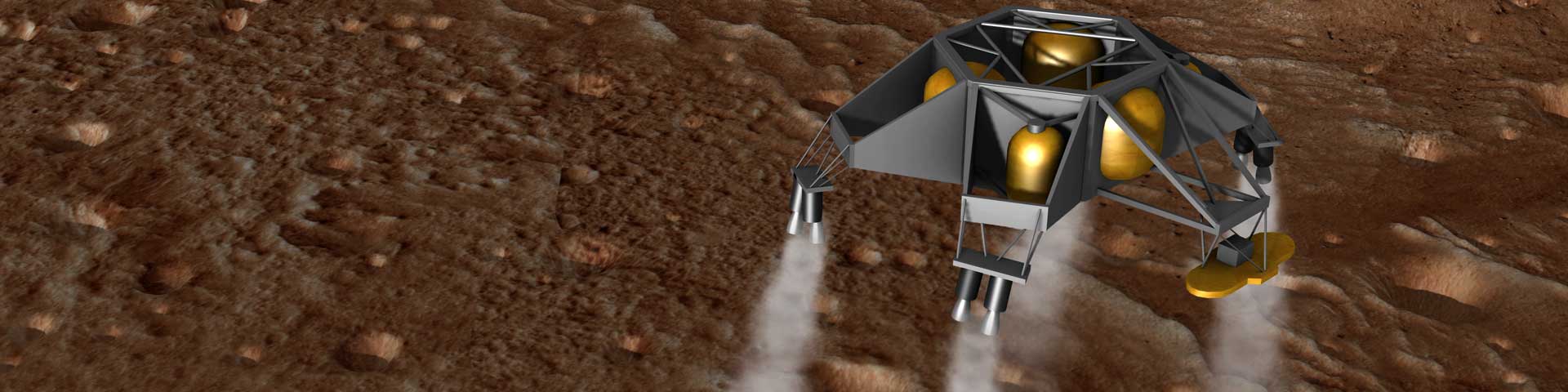
Im Rahmen des Projekts Virtual Crater wurde eine virtuellen Testumgebung entwickelt, die es ermöglicht, Robotersysteme kostengünstig in einer realitätsnah simulierten, lunaren Kraterlandschaft zu programmieren, zu testen und zu optimieren.
Posted by https://www.mmi.rwth-aachen.de/author/michael-schluse/& filed under .
Eine wichtige Fragestellung bei der Exploration fremder Planeten durch in großen Teilen autonom agierende mobile Roboter ist die Bestimmung der absoluten Position dieser Systeme auf dem Planeten.
Posted by https://www.mmi.rwth-aachen.de/author/michael-schluse/& filed under .
Im Projekt SELOK wurde untersucht, wie die Landmarken von einem mobilen Roboter abhängig von der Roboterposition u. a. mit neu entwickelten Laserscannern aus verschiedenen Perspektiven erfasst werden und zu einer lokalen Umgebungskarte zusammengefasst werden können.






{kind=link}
{kind=link}
{kind=link}