
Ein grundlegendes Konzept von Industrie 4.0 ist die Vernetzung aller Objekte (Produktionsmaschinen, Produkte …), die für einen Betrieb von Wert… Weiter »
![]()
![]()



Ein grundlegendes Konzept von Industrie 4.0 ist die Vernetzung aller Objekte (Produktionsmaschinen, Produkte …), die für einen Betrieb von Wert… Weiter »
In modern game engines and robotic simulations, the demands for simulation stability and computational performance are steadily increasing. Traditional physics… Weiter »
Description Cooperative Simultaneous Localization and Mapping (SLAM) algorithms have garnered attention in the field of robotics, particularly for their application… Weiter »

Masterarbeit: Heutzutage wird eine Vielzahl von Daten generiert und in verschiedenen Anwendungen genutzt. Dennoch gibt es verschiedene Hemmungen bei dem… Weiter »
Probabilistic Programming Languages (PPL) combine the representational capability of programming languages with statistical models to intuitively model inter-dependent variable distributions…. Weiter »

Klein- und mittelständische Unternehmen im produzierenden Gewerbe sind zumeist auf flexible Montagesysteme mit einem niedrigen Automatisierungsgrad und einem großen Einfluss… Weiter »
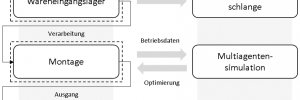
Klein- und mittelständische Unternehmen im produzierenden Gewerbe sind zumeist auf flexible Montagesysteme mit einem niedrigen Automatisierungsgrad und einem großen Einfluss… Weiter »

Punktwolken, ob durch Laserscanner oder durch kamerabasierter 3D Rekonstruktion erzeugt, spielen eine große Rolle beim Erfassen unserer Umgebung. Punktwolken haben… Weiter »
Automatisierte Dokumentation Digitaler Zwillinge
Architektur zur generischen Beschreibung von Szenarioverhalten
