{kind=link}
{kind=link}
{kind=link}
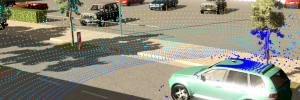
Die Entwicklung von immer fortschrittlicheren Fahrerassistenzsystemen und hochkomplexen autonomen Fahrzeugen stellt heutige Ingenieure vor immer größer werdende Herausforderungen…
![]()
![]()
Die Entwicklung von immer fortschrittlicheren Fahrerassistenzsystemen und hochkomplexen autonomen Fahrzeugen stellt heutige Ingenieure vor immer größer werdende Herausforderungen…
Unbemannte Flugobjekte oder UAVs (Unmanned Aerial Vehicles) werden am Institut für Mensch-Maschine Interaktion in diversen Bereichen verwendet.
„Industrie 4.0“-Konzepte und -Methoden liefern dringend benötigte neue Ansätze, den Cluster Wald und Holz durch Optimierung bestehender Prozesse aber auch mit neuen Geschäftsmodellen in die Zukunft zu führen.Die Initiative „Wald und Holz 4.0“ hat das Ziel, die im Rahmen von „Industrie 4.0“ entwickelten Ansätze auf die Verhältnisse im Cluster Wald und Holz zu übertragen, weiterzuentwickeln und auf diese Weise dessen strukturellen Nachteile durch ein neues, aus intelligenten und dezentral agierenden Komponenten und Diensten bestehendes Internet der Dinge und Dienste zu überwinden.
Bei der Mähdreschersimulation steht neben der realitätsnahen Simulation der Maschinen insbesondere die Simulation und Visualisierung der zu mähenden Felder im Vordergrund. Hierdurch haben Mähdrescherfahrer in Einführungskursen oder im Rahmen weiterführender Schulungsmaßnahmen die Möglichkeit zu lernen, wie sie die erstaunlich komplexe Mähtechnologie optimal einsetzen und neue Verfahren aus dem Bereich der Mähtechnik effizient für sich nutzen.
Die 3D-Simulation von Forstmaschinen ermöglicht ein gefahrloses und effizientes Training z. B. zum Zwecke der Aus- und Fortbildung von angehenden Forstmaschinenführern. Durch die realitätsnahe Simulation und die nahtlose Integration der notwendigen Bedienhardware kann der Schüler in sämtlichen Arbeitsabläufen geschult werden, die im Betrieb einer realen Maschine auftreten. Dies reicht von der Kranbewegung, der Steuerung des Fahrzeuges bis hin zur Bedienung des Bordcomputersystems. Gleichzeitig steht mit dem Forstmaschinensimulator ein ideales Marketing- und Entwicklungsinstrument zur Verfügung. Darüber hinausgehend fördert die vollständige Simulation des Arbeitsablaufs im Wald vom Fällen der Bäume mit dem Harvester über das Rücken mit dem Forwarder bis zum Abtransport mit dem Holztransporter fördert ein umfassendes Verständnis der Zusammenhänge.
Mit dem Virtuellen Wald gehen in Nordrhein-Westfalen die sprichwörtlichen Zeiten, in denen man den Wald vor lauter Bäumen nicht sehen konnte, dem Ende entgegen. Hierzu modelliert der Virtuelle Wald reale Waldbestände als virtuelles Ökosystem sowie als virtuellen Produktionsstandort und stellt auf dieser Basis neuartige Informations-, Planungs- und Orientierungsgrundlagen für die Forstwirtschaft aber auch etwa für die Erholung suchenden Bürger und Touristen bereit. Diese Instrumente und Techniken haben das Ziel, mit geringer Personalintensität eine nachhaltige und multifunktionale Forstwirtschaft zu betreiben, die der Holz verbrauchenden Industrie den notwendigen Rohstoff effizient bereitstellt. Mit diesem Ziel steht der Virtuelle Wald im Zentrum umfangreicher Maßnahmen zur Verbesserung der Wettbewerbsfähigkeit des Wirtschaftszweiges „Wald & Holz“ – insbesondere unter Berücksichtigung der Strukturschwächen bezüglich des Kleinstprivatwaldes. Das virtuelle Modell umfasst dazu unter anderem die Topografie, den Boden, die Wege, die Bebauung, die Bestockung etc. und reicht bis zur Einzelbaumdatenbank des Virtuellen Waldes, die jeden Baum in NRW mit seiner digitalen Visitenkarte (Geokoordinate, Höhe, Kronendurchmesser, BHD, etc.) beschreibt.
Weiterführende Informationen finden Sie auf der Projektwebsite des Virtuellen Waldes.
Beim Baumaschinensimulator steht die realitätsnahe Simulation der Maschinen selbst sowie insbesondere des Schüttgutes im Vordergrund. Hierdurch haben z. B. Auszubildende die Möglichkeit, ohne Gefahren für Fahrer, Umwelt oder Maschine die Fähigkeiten eines Schauffelbaggers zu erlernen. Hierzu werden vom Bagger bis zum LKW alle zum realitätsnahen Training notwendigen Fahrzeugtypen simuliert. Die einzelnen Fahrzeuge können zudem auch miteinander interagieren, so dass der Bagger den LKW auch beladen kann.
Serviceroboter sind weltweit auf dem Vormarsch. Ihnen wird ein noch größeres Marktpotenzial vorhergesagt als den Industrierobotern. Sie sollen den Menschen in vielen Bereichen des täglichen Lebens bei unterschiedlichen Handhabungs-, Transport- und Bearbeitungsaufgaben unterstützen oder zu ihrer Unterhaltung beitragen. Die Entwicklungen im Bereich der Servicerobotik am MMI kombinieren Entwicklungen aus Bereichen wie 3D-Simulationstechnik, Weltraumrobotik, mobile Robotik oder Arbeitsmaschinensimulation zu neuen Methoden und Anwendungen im Bereich der Servicerobotik. Im Mittelpunkt stehen unter anderem die Bereitstellung leistungsfähiger Virtueller Testbeds als Grundlage für die Entwicklung neuartiger Serviceroboter, die Entwicklung neuer Lokalisierungs- und Navigationsverfahren sowie die Realisierung intelligenter Robotersysteme durch den Einsatz von 3D-Simulationstechnik auf dem Roboter selbst („Embodied Simulation“).
Im Jahr 2007 zog der Orkan Kyrill über Europa und verursachte allein in Nordrhein-Westfalen Waldschäden in Höhe von schätzungsweise 1,5 Milliarden Euro. Um in Zukunft solche Schäden zu minimieren, können Sturmsimulationen als passendes Hilfsmittel zur Unterstützung der Waldplanung herangezogen werden.
Die Entwicklung und der Betrieb autonomer Unterwasserfahrzeuge (AUV) ist eine komplexe, gefährliche und teure Aufgabe. Daher wurden am MMI Konzepte für ein Virtuelles Testbed für Unterwasserfahrzeuge entwickelt, die zukünftig die mit dem Betrieb von AUVs verbundenen Kosten und die Gefahren senken sollen. Grundlage ist eine umfassende und realitätsnahe 3D-Simulation, die die Dynamik starrer Körper im Unterwasserumfeld ebenso umfasst wie die Simulation von Aktoren und Sensoren.

